Multi-unit linear driving planar controllable slip type wood forklift
A linear drive and linear drive technology, applied in mechanically driven excavators/dredgers, earth movers/shovels, construction, etc., can solve the problems of weak load capacity, poor mechanical performance of controllable mechanism loading and unloading machinery, etc. , to achieve the effect of improving the bearing capacity, realizing the numerical control of the operation, and avoiding the transmission chain
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solutions of the present invention will be further described below through the accompanying drawings and embodiments.
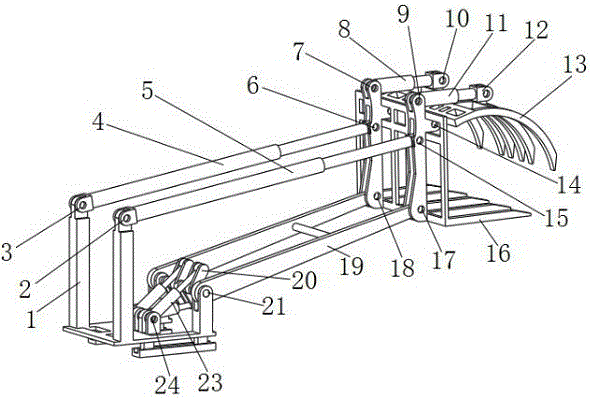
[0026] control figure 1 , a multi-unit linear drive planar controllable sliding forklift according to the present invention includes a multi-unit linear drive mechanism, a boom 19, a bucket control mechanism and a frame 1.
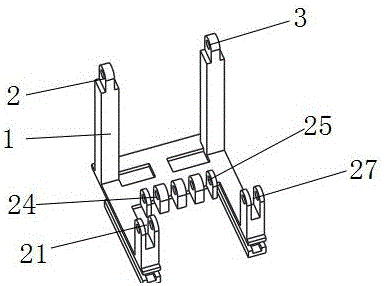
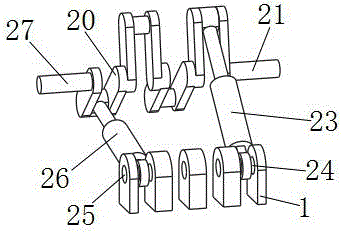
[0027] control figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , the multi-unit driving mechanism includes a crankshaft 20, a first linear driver 23 and a second linear driver 26, one end of the first linear driver 23 is connected to the frame 1 through the first rotating pair 24, and the other end is connected to the frame 1 through the second The rotary pair 28 is connected to the crankshaft 20 , one end of the second linear drive 26 is connected to the frame 1 through the third rotary pair 25 , and the other end is connected to the crankshaft 20 through the fourth rotary pair 29 . The crankshaft 20 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com