Information processing method and system for intelligent robot
An information processing method and intelligent robot technology, applied in the field of intelligent robots, can solve the problems of lack of active emotional communication, failure to cultivate user dependence and user stickiness, etc., to achieve the purpose of cultivating dependence, small jumps, and cultivating user stickiness Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
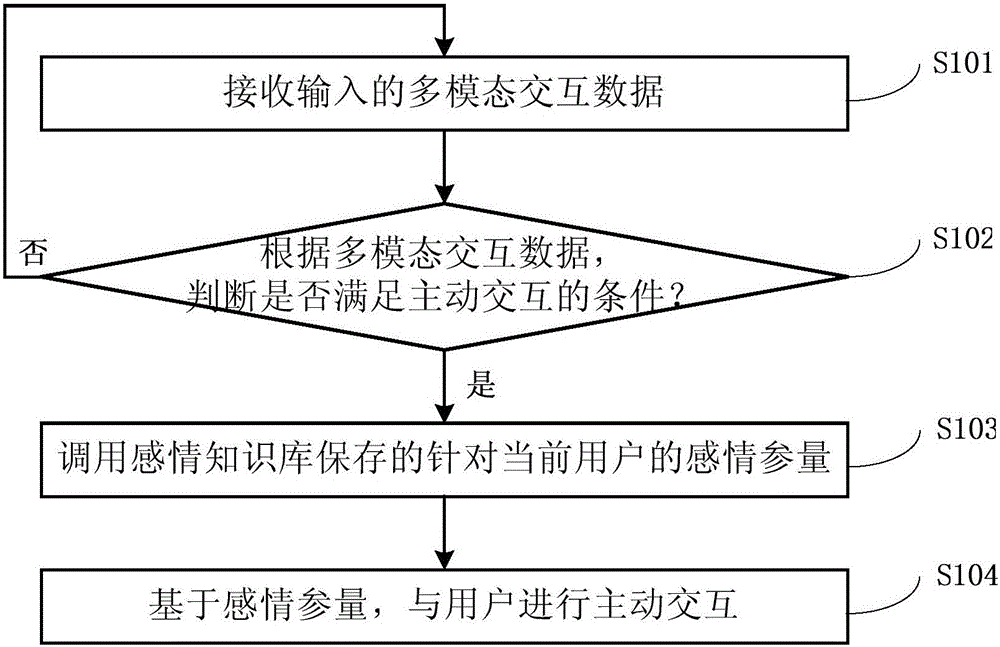
[0046] figure 1 A schematic flowchart of an information processing method oriented to an intelligent robot according to an embodiment of the present invention is shown. Such as figure 1 As shown, the intelligent robot-oriented information processing method of the embodiment of the present invention mainly includes steps 101 to 104 .
[0047] In step 101, input multimodal interaction data is received.
[0048] Specifically, the multimodal interaction data is generally obtained by the front-end module. Multimodal interaction data mainly involves one or more types of interactive information data such as visual information data, voice information data, and tactile information data. After receiving interactive information such as visual information, voice information, and tactile information, the system performs corresponding processing on various types of information to obtain multi-modal interactive data.
[0049] For example, for visual information, the system first detects ...
Embodiment 2
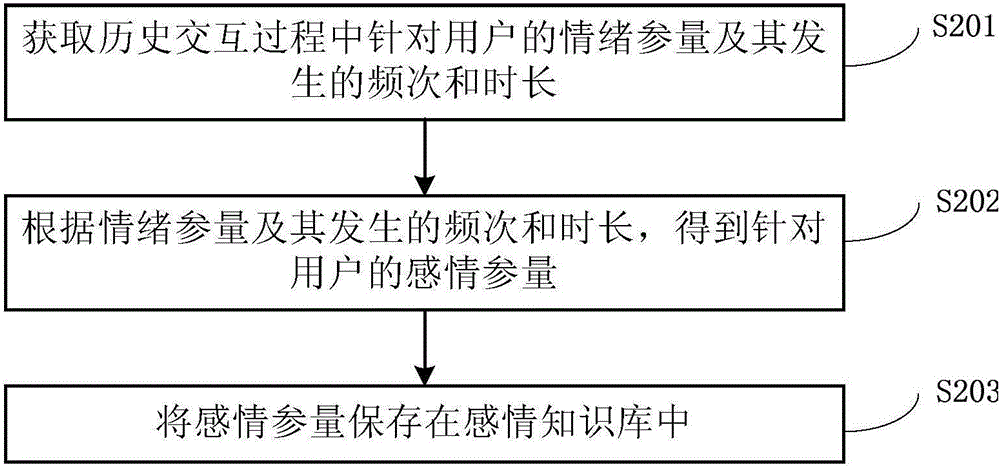
[0074] Based on the first embodiment, the intelligent robot-oriented information processing method of this embodiment further includes the step of constructing an emotional knowledge base. The following combination figure 2 The method of constructing emotional knowledge base is described in detail.
[0075] figure 2 A schematic flowchart of a method for constructing an emotional knowledge base in an embodiment of the present invention is shown. Such as figure 2 As shown, the method for constructing an emotional knowledge base in this embodiment mainly includes steps 201 to 203 .
[0076] In step 201, the emotional parameters for the user in the historical interaction process and the frequency and duration of occurrence are obtained.
[0077] Specifically, first obtain all / main emotional stimuli (including positive emotional stimuli and negative emotional stimuli) directed at the user by the intelligent robot in the past preset period, and then score and quantify each ac...
Embodiment 3
[0092] Corresponding to the first and second embodiments above, the embodiment of the present invention provides an information processing system for intelligent robots. Figure 4 A schematic structural diagram of an information processing system oriented to an intelligent robot according to an embodiment of the present invention is shown. Such as Figure 4As shown, the information processing system for intelligent robots in the embodiment of the present invention mainly includes a multimodal interaction data receiving module 401 , a judging module 402 , an emotion knowledge base 403 , an emotion parameter calling module 404 and an active interaction module 405 . Among them, the multimodal interaction data receiving module 401 is connected to the active interaction module 405 through the judging module 402 and the emotional parameter calling module 404 , and the emotional parameter calling module 404 is also connected to the emotional knowledge base 403 .
[0093] Specificall...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com