Nested saturation nonlinear design method of four-rotor wing unmanned aerial vehicle control system
A technology of four-rotor UAV and control system, which is applied in computing, special data processing applications, instruments, etc., and can solve problems such as unsatisfactory control effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0024] Specific embodiment one: the nested saturated nonlinear design method of the quadrotor unmanned aerial vehicle control system of the present embodiment, comprises the following steps:
[0025] Step 1: Perform state transformation on the control system of the quadrotor UAV, and transform it into a feed-forward nonlinear control system;
[0026] Step 2: Design the nested saturated nonlinear control law of the quadrotor UAV pitch channel control system
[0027] τ θ = - ϵ 4 θ r θ σ [ r θ λ θ w 4 ϵ 4 θ + ...
specific Embodiment approach 2
[0038] Specific implementation mode two: the specific process of converting the quadrotor unmanned aerial vehicle control system into a feed-forward nonlinear control system described in step one of the present embodiment is as follows:
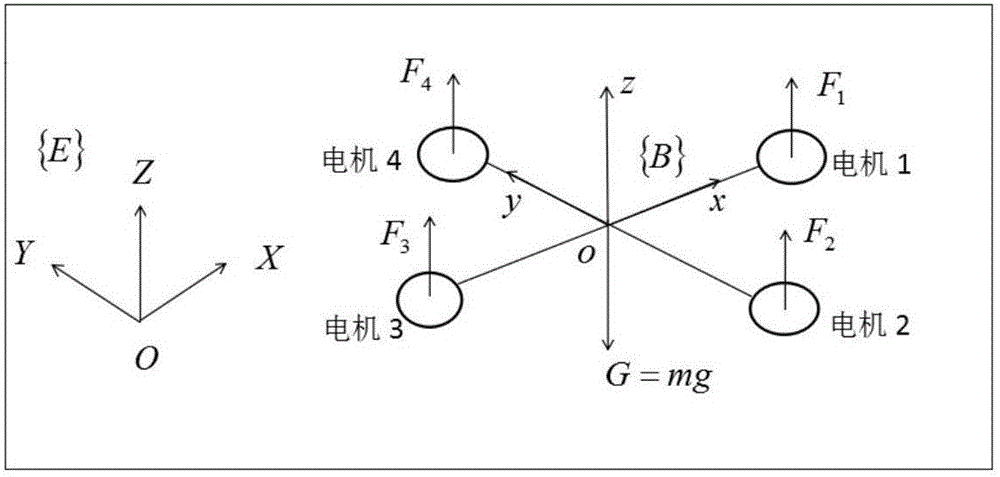
[0039] For such as figure 1 The quadrotor UAV system shown is modeled as
[0040] m X ·· = u ( c o s ( φ ) c o s ( ψ ) s i ...
specific Embodiment approach 3
[0089] Specific implementation mode three: the specific design process of designing the nested saturated nonlinear control law of the pitch channel control system in step two of this implementation mode is as follows:
[0090] Step 3.1: Define the general saturation function:
[0091] σ ε ( ) is a general saturation function, defined as follows
[0092] σ ϵ ( x ′ ) = ϵ , x ′ > ϵ x ′ , - ϵ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com