Speed planning method during NURBS curve interpolation of industrial robot
An industrial robot, speed planning technology, applied in the direction of instruments, digital control, control/regulation systems, etc., can solve the problems of robot impact, robot end feed speed adaptive change, vibration, etc., and achieve the effect of reducing impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The purpose of the present invention will be further described in detail through specific examples below, and the examples cannot be repeated here one by one, but the implementation of the present invention is not therefore limited to the following examples.
[0060] A speed planning method during NURBS curve interpolation of an industrial robot, comprising steps:
[0061] S1, establish the characteristic equation of NURBS curve based on parameter u and feed rate v;
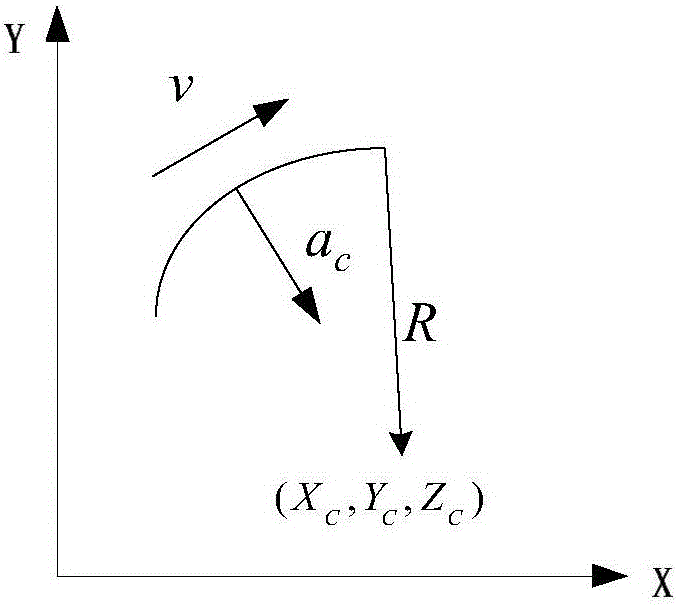
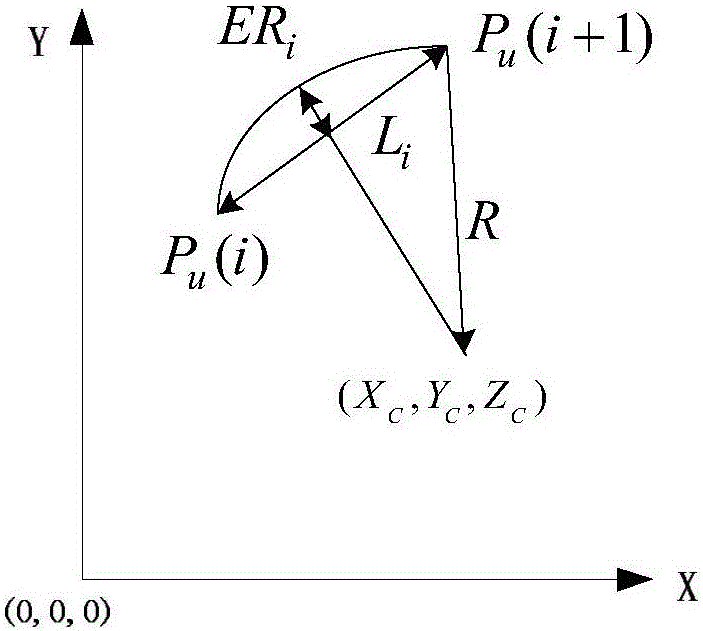
[0062] S2. Establishing the velocity constraint relationship of the NURBS curve based on geometric constraints such as centripetal acceleration and bow height error;
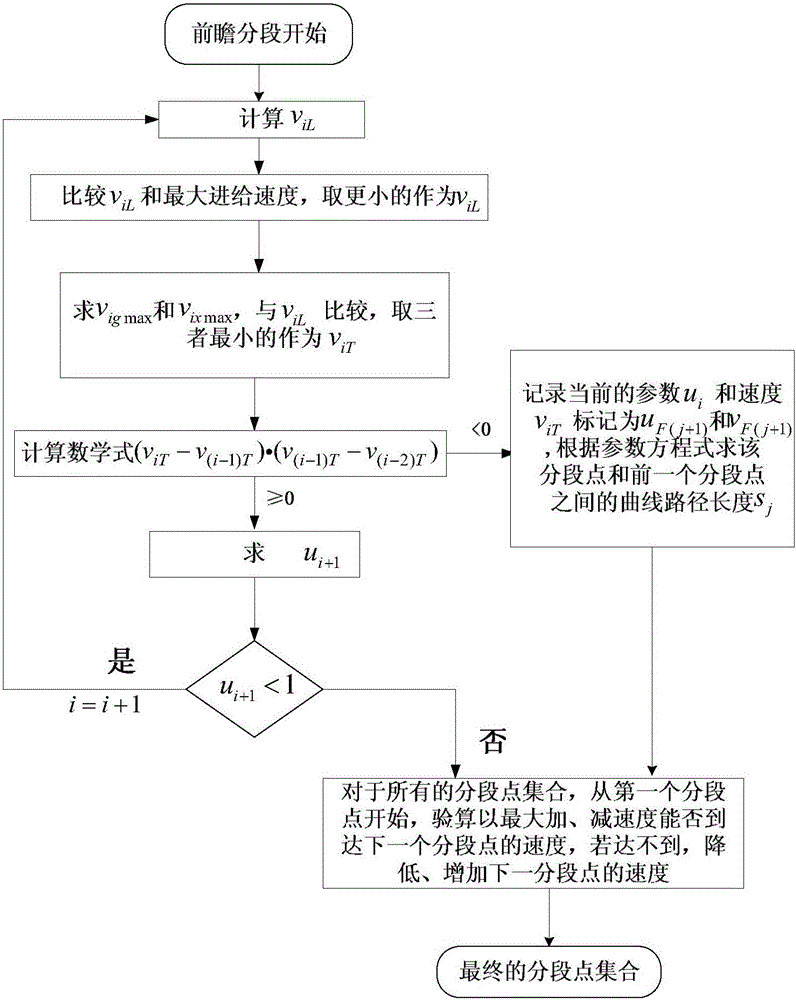
[0063] S3. According to the monotonicity of the feed speed change at the end of the robot, the NURBS curve is processed in forward-looking speed segments to obtain the final set of interpolation parameters for segment points, and complete the speed planning process.
[0064] Specifically, the step S1 specifically includes:
[0065] S11. Es...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com