


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Fusion positioning navigation time service calculating model building method considering satellite navigation intersystem deviation
A technology of satellite navigation system and calculation model, which is applied in the field of satellite surveying, mapping, navigation and positioning, can solve problems such as user confusion, disregard of the influence of deviations between systems, and lack of precision, and achieve improved navigation and positioning accuracy and reliability, strong operability, Effects that are easy to scale up
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
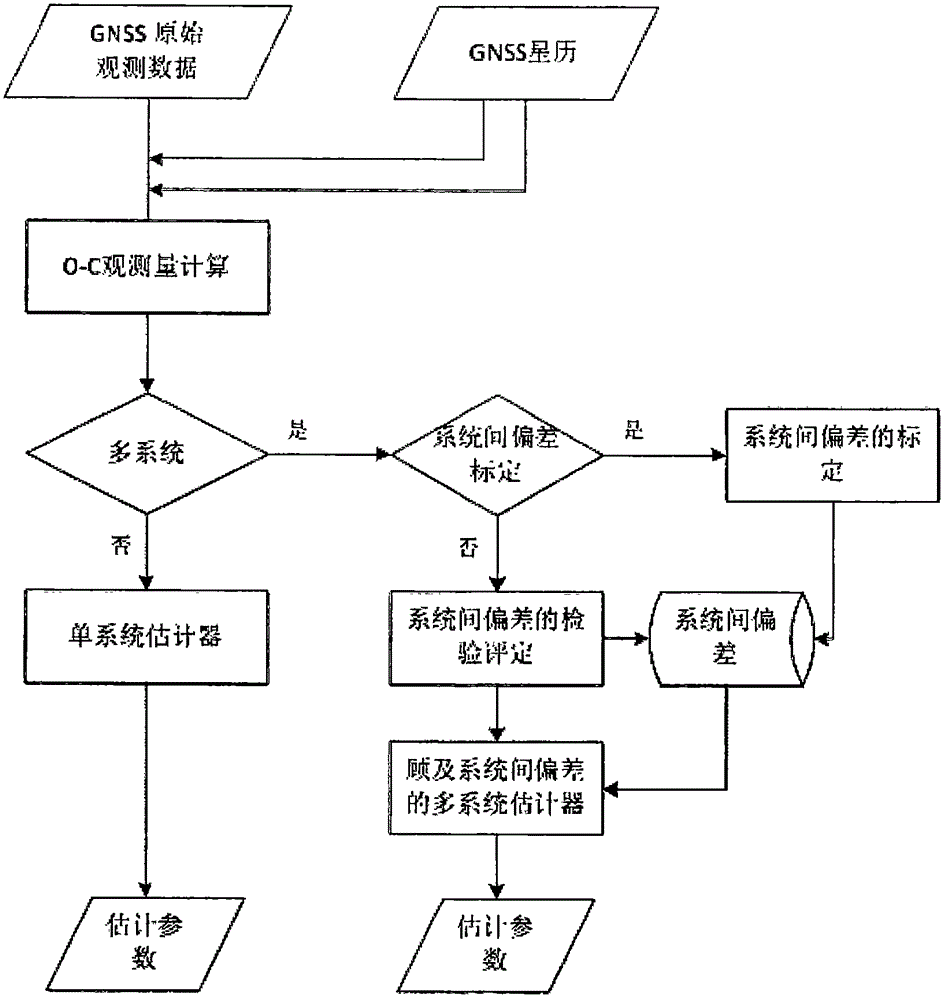
[0030] Firstly, the inter-system deviation of GPS relative to BDS of the same type of GNSS compatible receiver is calibrated.
[0031] The first step is to collect observation data, place the GNSS compatible receiver at a stationary station with coordinates of several centimeters to collect 30S BDS / GPS data, including GNSS observation raw data and GNSS ephemeris;
[0032] The second step is to calculate the O-C observations, using the original BDS / GPS observation data of the station, and interpolating the satellite position at the time of satellite signal transmission by using the observation epoch and the distance observations in the observation data, after various atmospheric corrections and satellite clock differences Correction and other error correction, calculation of O-C observations
[0033] The third step is to calculate the deviation parameters between systems.
[0034] ①The observation station has high-precision coordinates, and its point coordinates are given stro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com