Inertia/zero-speed/GPS based pedestrian seamless combined navigation positioning method
A positioning method and integrated navigation technology, applied in navigation through speed/acceleration measurement, satellite radio beacon positioning system, navigation, etc., can solve problems such as high cost, unfavorable promotion and application, and large application limitations, and achieve improved reliability Performance and accuracy, improved stability and reliability, and improved accuracy and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
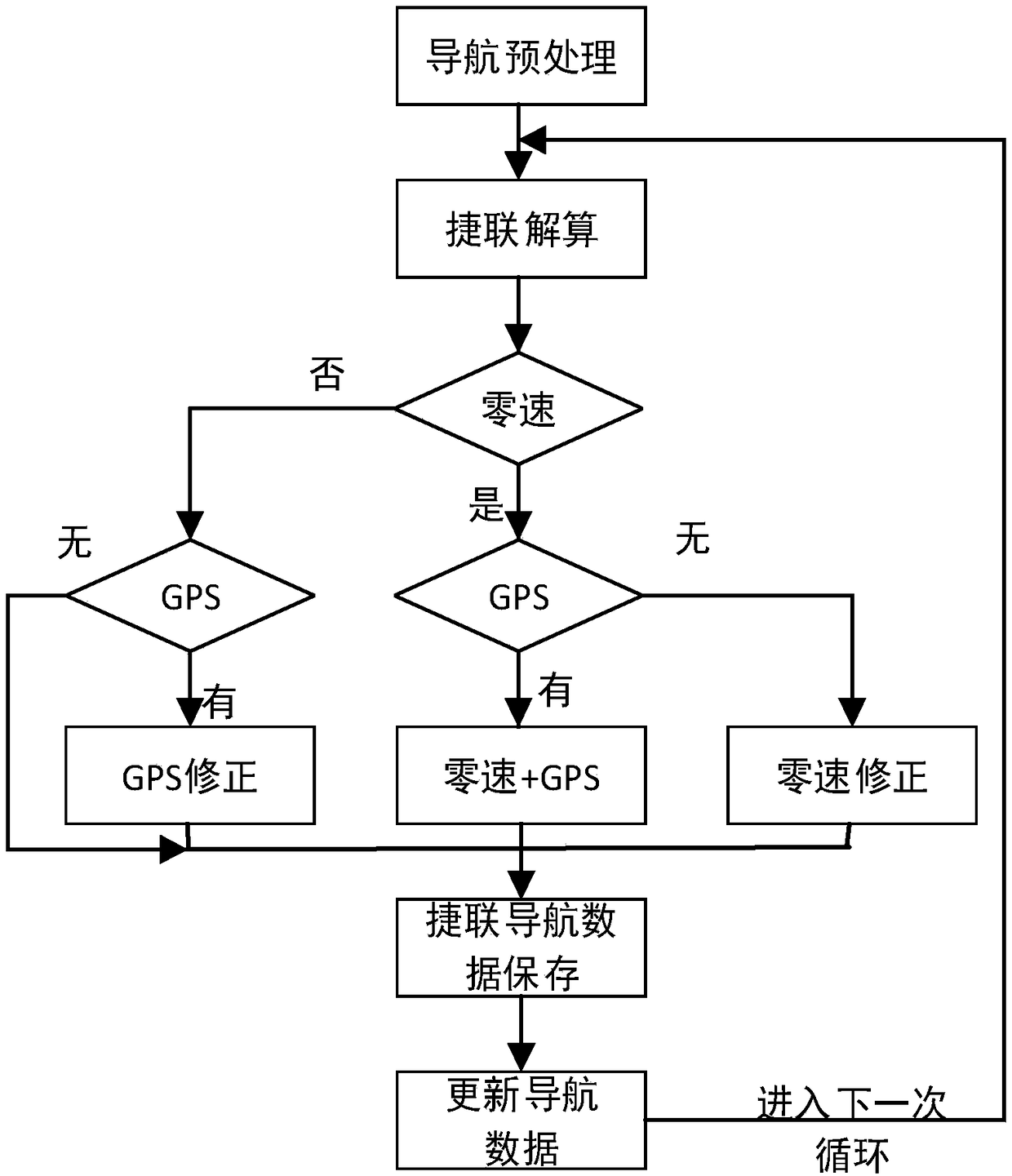
[0057] 1. Analyze the output characteristics of the inertial sensor under the pedestrian running gait and carry out strapdown calculation
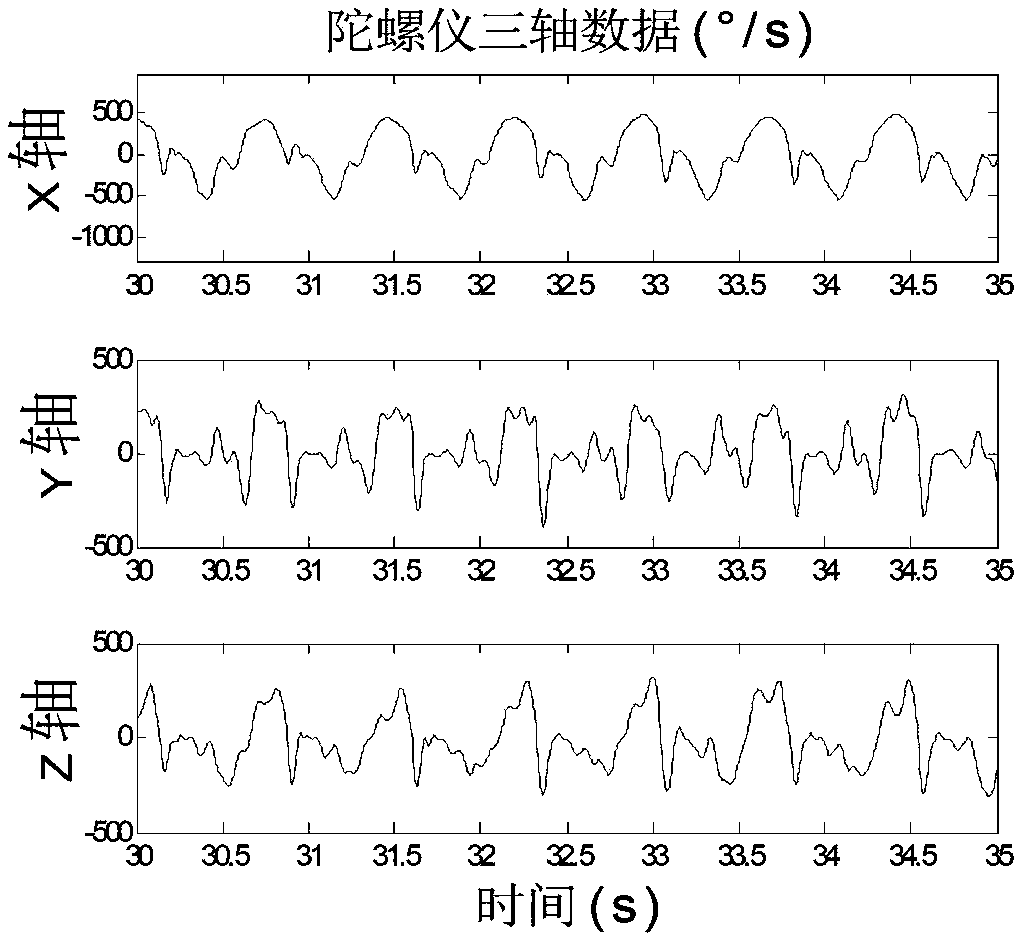
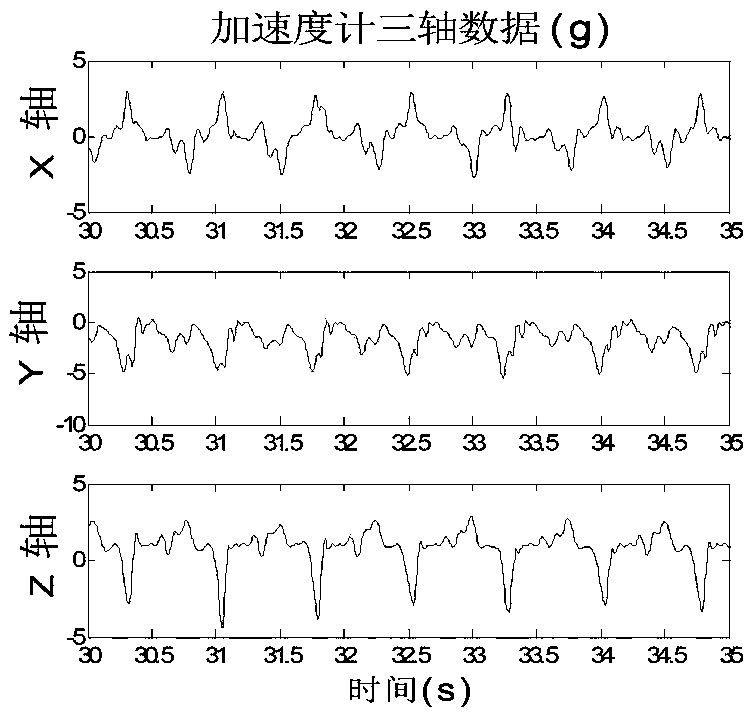
[0058] During the pedestrian running process, the foot movement is divided into four stages: lifting the foot (toe touches the ground), hanging (the sole of the foot is off the ground), landing (the heel touches the ground) and supporting (the sole of the foot touches the ground). The sensor is fixed on one of the feet , to perform motion analysis on the output information of the inertial sensor, such as figure 2 and image 3 As shown, the three-axis acceleration and three-axis angular velocity data are periodic. The figure contains 7 complete cycles, each cycle is 0.7 seconds, and the time when the foot is completely in contact with the ground is about 0.05-0.08 seconds. This time It should be corrected at zero speed in the section.
[0059] 2. Establish a zero-speed detection model based on pedestrian running gait
[0060] Based on t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com