Error suppressing method of fiber strap-down inertial navigation system based on three-axis rotation
A technology of optical fiber strapdown inertial navigation and system error, applied in the field of measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
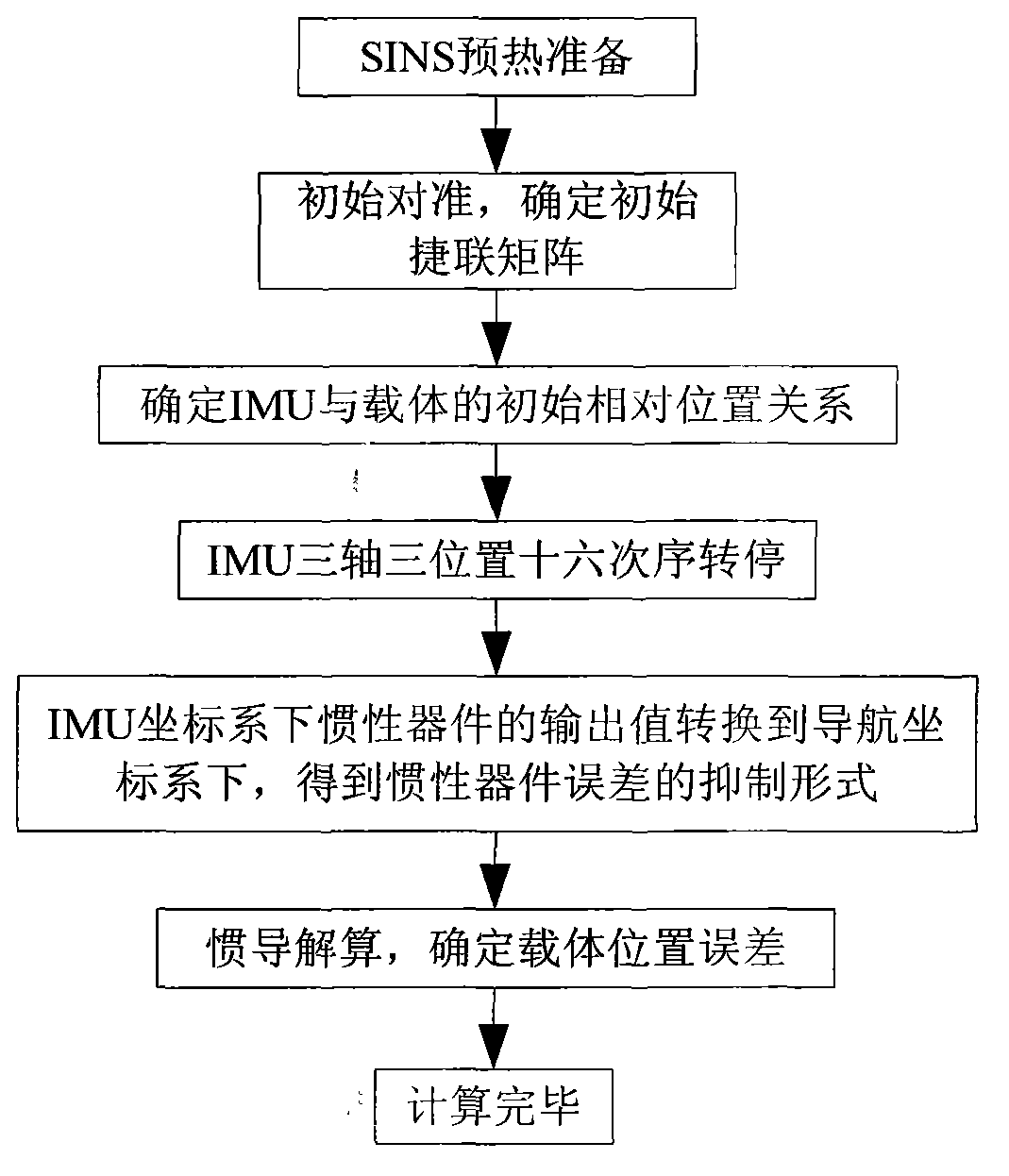
[0068] The specific embodiment of the present invention is described in detail below in conjunction with accompanying drawing:
[0069] (1) Determine the initial position parameters of the carrier by GPS, and bind them into the navigation computer;
[0070] (2) The strapdown inertial navigation system is preheated, and the data output by the fiber optic gyroscope and the quartz accelerometer are collected and processed;
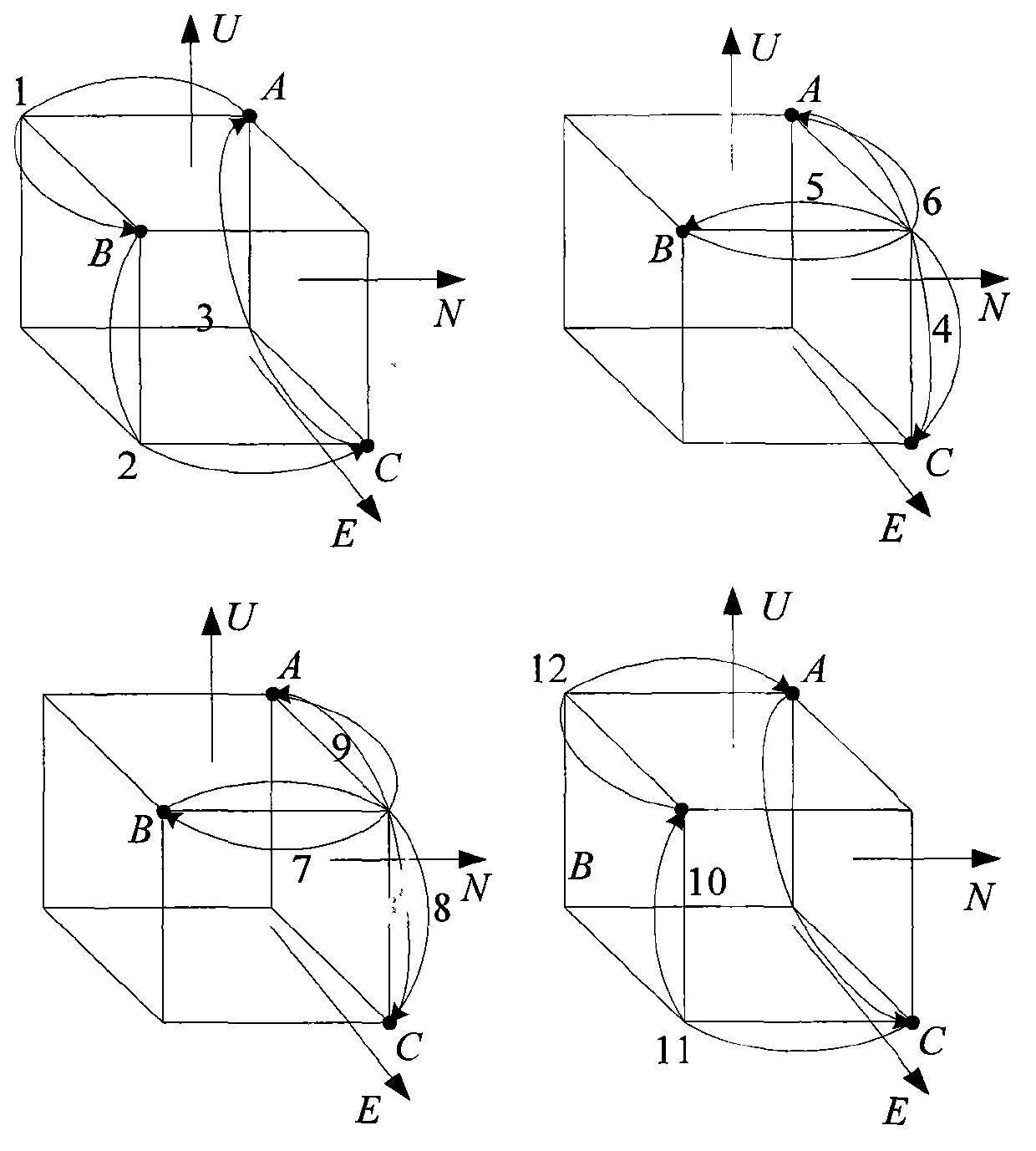
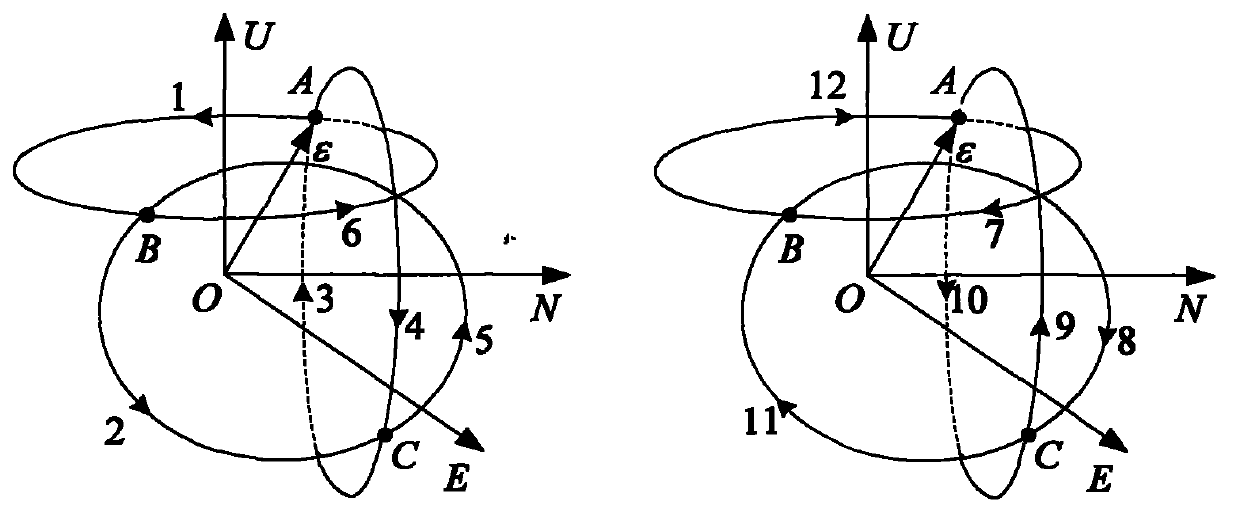
[0071] (3) The IMU adopts an indexing scheme in which twelve rotation-stop sequences are one rotation cycle (as shown in the attached figure 2 );
[0072] Sequence 1, IMU starts from point A and rotates 180° counterclockwise to reach position B, stop time T s ;Sequence 2, IMU starts from point B and rotates 180°counterclockwise to reach position C, stop time T s ;Sequence 3, IMU starts from point C and rotates 180°counterclockwise to reach position A, stop time T s ;Sequence 4, IMU starts from point A and rotates 180°counterclockwise to reach position C, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com