Four-freedom-degree series-parallel damping mechanical foot for humanoid robot
A humanoid robot and degrees of freedom technology, applied in the field of humanoid robots, can solve problems such as less freedom of movement, inability to better simulate the subtle movements of human feet, and inability to achieve automatic vibration reduction, etc., and achieve a simple and reasonable structure and good effect. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
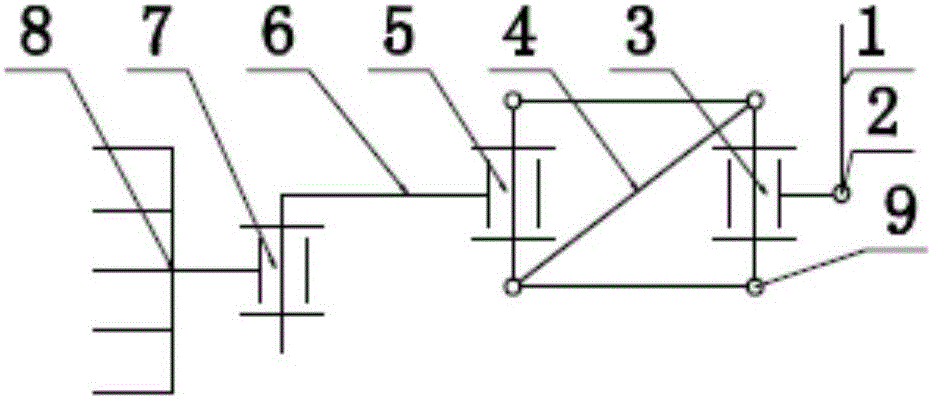
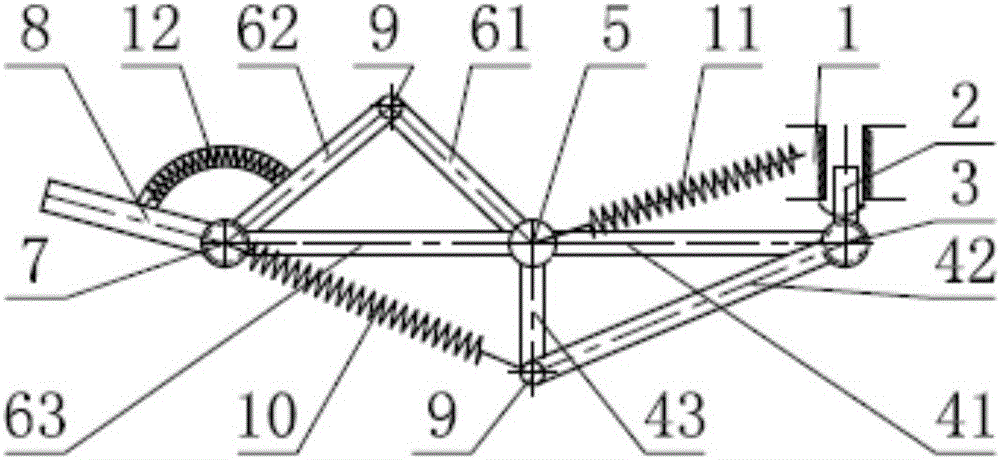
[0015] combine figure 1 and figure 2 , the humanoid robot four-degree-of-freedom hybrid shock-absorbing mechanical foot of the present invention includes a mechanical lower leg 1, an ankle joint axis A2, an ankle joint axis B3, a tarsal frame 4, a metatarsal frame 6, a tarsal-metatarsal joint 5, a toe joint 7 and parallel Toes 8; mechanical calf 1 is connected through ankle joint axis A2 and ankle joint axis B3; tarsal frame 4 is a triangular frame structure, including tarsal bar A41, tarsal bar B42 and tarsal bar C43; metatarsal frame 6 is composed of metatarsal bar A61 , a triangular structure composed of metatarsal bar B62 and metatarsal bar C63; the parallel toes 8 move around the toe joint 7 relative to the metatarsal frame 6, the metatarsal frame 6 moves around the tarsal metatarsal joint 5 relative to the tarsal frame 4, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com