Mobile robot indoor positioning method and system based on geomagnetic sequences
A mobile robot, indoor positioning technology, applied in ground navigation and other directions, can solve the problems of low WiFi reception sensitivity, time-varying signals, indoor layout and external signal interference, and limit the large-scale use of positioning technology, to achieve a lot of cost savings and positioning accuracy. Excellent, stable signal effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] Hereinafter, the present invention will be described in detail through specific embodiments in conjunction with the drawings. It should be understood that the embodiments here are only used to help understand the present invention, but do not limit the content of the present invention in any form. If there are processes that are not specifically described in detail below, those skilled in the art can refer to the prior art. .
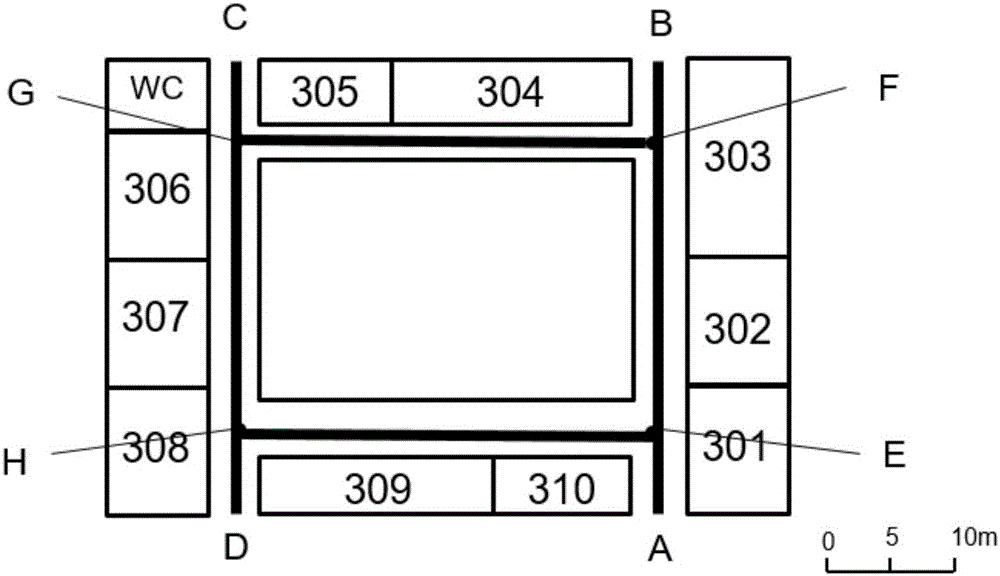
[0046] Such as figure 1 As shown, in one embodiment of the present invention, a description diagram of a method for collecting a geomagnetic sequence fingerprint of a mobile robot is provided.
[0047] In step 1 of the collection method, the corridor passage of the indoor plan map is divided into 4 straight lines, which are AB, CD, EH and FG in order. The reachable area of the mobile robot (WC, 301-310) is limited to the corridor represented by 4 straight lines.
[0048] In step 2 of the collection method, the mobile robot sequentially collects geo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com