Rigid-flexible hybrid manipulator, robot and method with vibration excitation function
A manipulator and hybrid technology, applied in the directions of manipulators, manufacturing tools, chucks, etc., can solve the problems of large shaking amplitude, limit the production efficiency of enterprises, and difficult to control, and achieve the requirements of reducing motion accuracy, easy to control shaking amplitude, and reduce production. cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
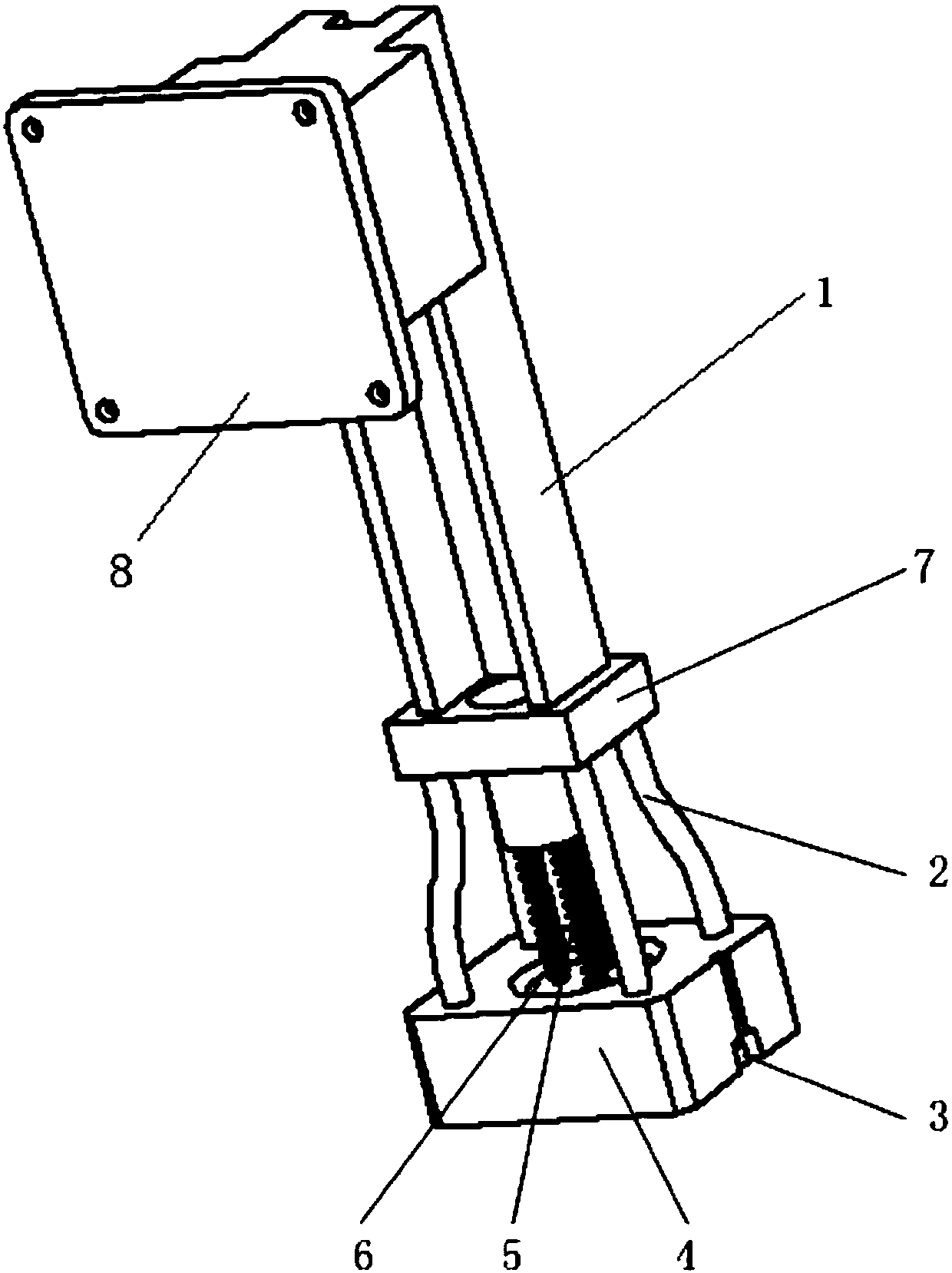
[0035] Embodiment 1: A kind of rigid-flexible hybrid manipulator with exciting function, its structure is as follows figure 1 shown, including:
[0036] The manipulator cantilever 1 made of metal, the upper end of the manipulator cantilever 1 is an assembly part 8 with a plurality of threaded holes; the lower end of the assembly part 8 is a connecting part 7 .
[0037] One end of the steel chain 2 is fixedly connected to the connecting portion 7 , and the other end of the steel chain 2 is fixedly connected to the reclaiming mechanism 4 . The steel chain 2 can be selected as an ordinary flexible steel chain. The single length of the steel chain 2 is about 200mm. While meeting the strength requirements, it avoids stress concentration and rigid impact, and controls the shaking amplitude during rapid movement.
[0038] At the same time, the connecting portion 7 is also fixedly connected to a plurality of return springs 5 , and the other end of the return springs 5 is fixedly...
Embodiment 2
[0047] Embodiment 2: A robot with a three-axis linkage function, and the rigid-flexible hybrid manipulator in Embodiment 1 is installed on the robot.
[0048] In the robot of the present invention, the retrieving method is:
[0049] The robot based on the three-coordinate servo control system, when the X, Y, and Z coordinates are linked, controls the manipulator to 100mm above the center of gravity of the plate to be picked (the specific value can also be set according to the actual situation), through the Siemens PLC S7-300 program, Control the energization time and frequency of the excitation electromagnet on and off, and use the adsorption force between the excitation electromagnet and the plate to achieve the purpose of knocking and vibration, so that the target plate is separated from other plates.
[0050] After the excitation is completed, control the Z-axis motor of the picking robot to move down 105mm (debug and set the specific value according to the actual situation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com