A Linear Programming Method for Wireless Sensor Networks
A wireless sensor and linear programming technology, applied in network planning, network topology, wireless communication, etc., can solve the problems of not forming a unified framework structure, not fully considering the deployment of sensor nodes, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0046] Specific implementation mode 1: A linear programming method for a wireless sensor network in this implementation mode is specifically prepared according to the following steps:
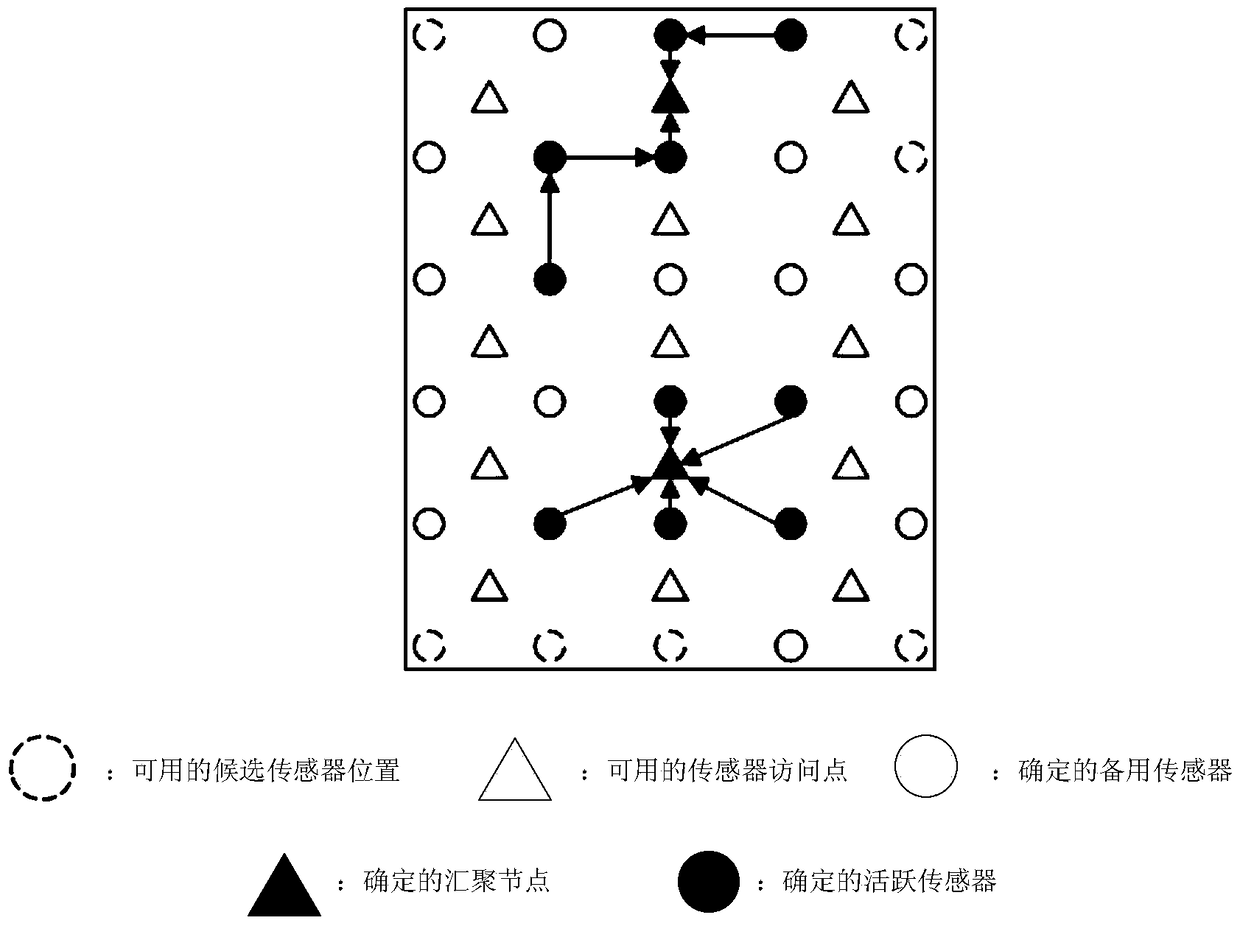
[0047] Step 1. Assuming that there are K points in the wireless sensor network, in each time period t in the wireless sensor network lifetime T, select P nodes from K to arrange anchor nodes to obtain the number of anchor nodes as shown in formula (5) Show:
[0048]
[0049] Among them, z θt Indicates whether there is an anchor node at point θ in period t; z θt ∈ {0,1}, when z θt When it is 1, there is an anchor node deployment at point θ in period t, z θt When it is 0, there is no anchor node deployment at point θ in period t; N is the set of anchor node positions; P is the number of anchor nodes, P≤K, and the minimum value of P depends on the actual network requirements; T is the wireless sensor network length of life;
[0050] The number of sensors meets the requirements for active s...
specific Embodiment approach 2
[0082] Specific implementation mode two: the difference between this implementation mode and specific implementation mode one is: the flow balance equation in step two is specifically:
[0083]
[0084] In the formula, a irt =w t ·q irt is an auxiliary variable; x irjst The sum of the data flow from Sensor(i,r) to Sensor(j,m) in period t; Sensor(j,m) is the sensor of type m at point j; m∈R; S jm is the location of candidate sensors around Sensor(j,m); S ir , S jm ∈ S; S ir is the location of candidate sensors around Sensor(i,r); w t is the duration of period t; h r is the data generation rate of sensors of type r; y irθt is the sum of the data flow from Sensor(i,r) to sink node at point θ in period t; N ir The position of the anchor node set close to Sensor(i,r). Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0085] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: in step three, according to the energy consumption value f of the sensor ir Calculate the upper limit of the total energy consumption of the sensor as B, as shown in formula (7):
[0086]
[0087] Among them, E r The constraints to be met are:
[0088]
[0089] If the P nodes have no sensor deployment and satisfy the formula (4), then the P nodes cannot have sensor-to-node data flow;
[0090]
[0091] the y irθt is the sum of the data flow from Sensor(i,r) to sink node at point θ in period t if p ir with q irt Satisfy the formula (8), ensure that the sensors that are not deployed are in a dormant state;
[0092] q irt ≤p ir i∈S, r∈R, t∈T (8)
[0093] q irt is the probability that Sensor(i,r) is active in period t; the values are 1 and 0, if q irt If it is 1, Sensor(i,r) is active, if q irt If it is 0, Sensor(i,r) is in a dormant state; z θt ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com