Transitional track planning method applied by industrial robot
An industrial robot and trajectory planning technology, which is applied to manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as difficult control of quintic curve geometry, lack of engineering constraints, and influence on trajectory smoothness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
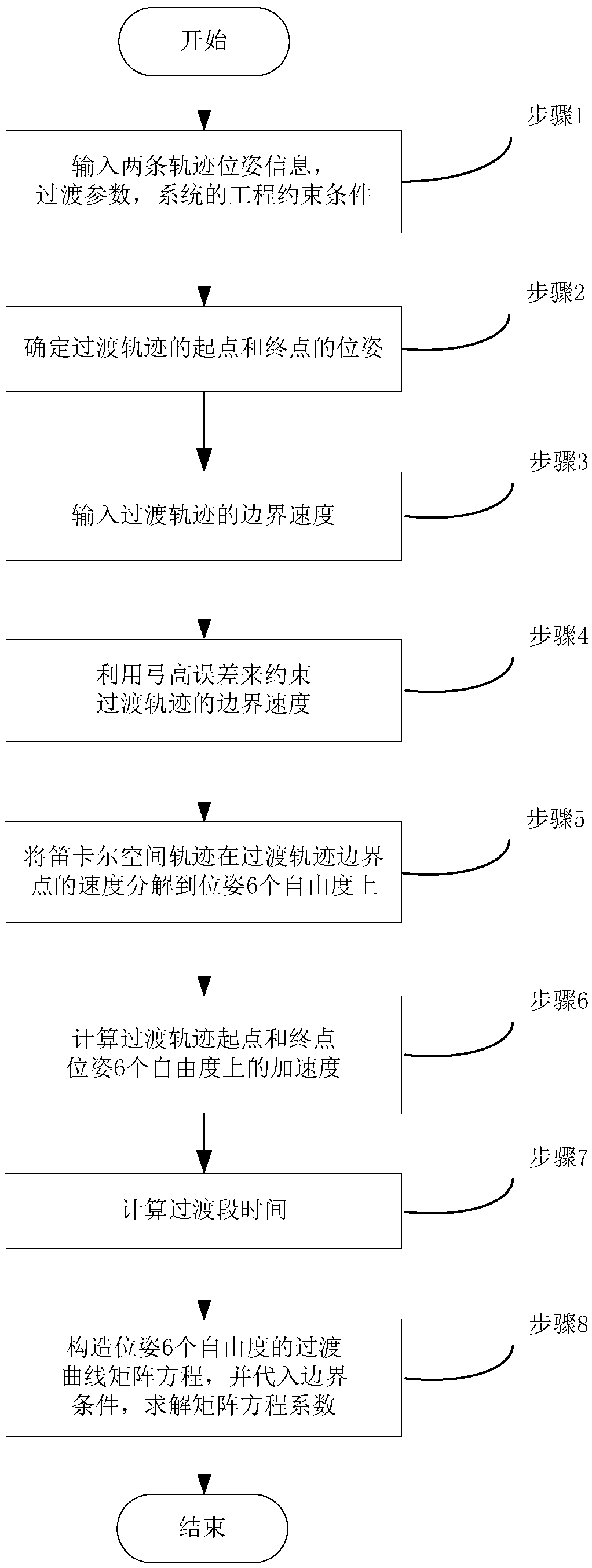
Method used
Image

Examples
Embodiment Construction
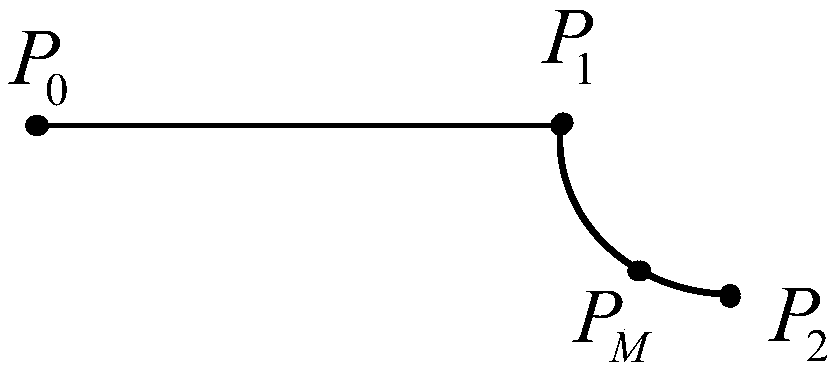
[0057] The present invention will be further described below in conjunction with the SCARA robot system. The system consists of a SCARA industrial robot, a control cabinet, and a teaching box. The arm of the SCARA robot is 300mm long, the small arm is 300mm long, and the up and down travel of the joint 3 is 200mm. The SCARA robot only has the γ-axis attitude. For a unified description, the α-axis attitude and the β-axis attitude are reserved, but the value is set to zero, which does not affect the calculation process. Use the teaching box to teach the linear trajectory P 0 P 1 , and then teach the arc trajectory P 1 P 2 , P M is a point on the arc trajectory, such as figure 2 shown, the taught out P 0 The pose is (-200,-300,200,0,0,-45), and the taught P 1 The pose is (0,-300,200,0,0,45), and the taught P 2 The pose is (100,-400,200,0,0,45), and the taught P M The pose is (50.2429,-386.7423,200,0,0,45), where the position unit is mm and the attitude unit is degree. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com