


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Method for detecting robot precision by projection imaging of material allowing quick conversion between solid phase and liquid phase
A technology of rapid conversion and imaging detection, applied in instruments, measuring devices, optical devices, etc., can solve the problems of many models, complex access structure, high cost, and achieve enhanced test accuracy, high degree of intelligence, and reduced investment. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0029] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
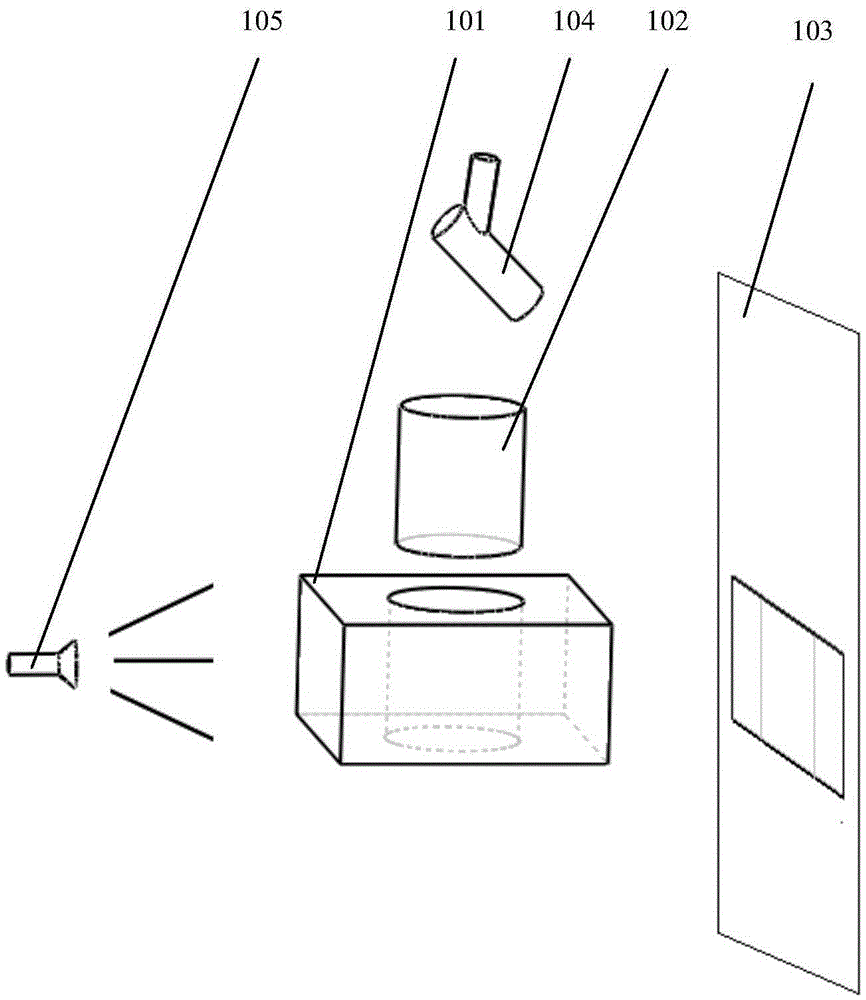
[0030] Such as Figure 1 to Figure 7 Shown: a method for detecting the accuracy of a robot using projection imaging of solid-liquid phase rapid conversion materials, the specific steps are as follows,
[0031] Step 1: Prefabricate a test mold cavity made of transparent glass, and the test mold cavity can be concave conical, circular, square, hexagonal, hemispherical, or in various shapes as required The combination;
[0032] Step 2: Use the tested robot to process ice cubes from -18 degrees Celsius to -4 into cones, cylinders, cuboids, tetrahedrons, cuboids, or hemispherical test pieces. Use dry ice mist to maintain the temperature of the ice c...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Melting point | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com