


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Pneumatic injector used for micro-operation robot system
A robot system and syringe technology, applied in biochemical instruments, methods of sampling biological materials, biochemical equipment and methods, etc., can solve the problems of linearity, stability and repeatability of air pressure, unfavorable pressure value analysis and control, etc. , to achieve the effects of improved test stability, stable air pressure, good linearity and repeatability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
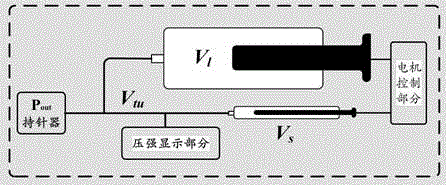
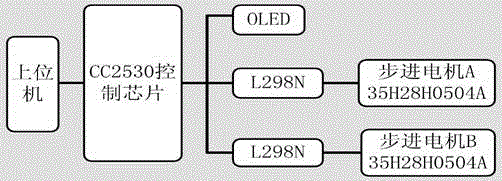
[0031] Such as Figure 1 to Figure 3 As shown, the pneumatic injector for the micro-operation robot system provided by the present invention mainly includes the following three parts: 1) the air circuit part; 2) the mechanical structure part; 3) the air pressure display and the motor control part;
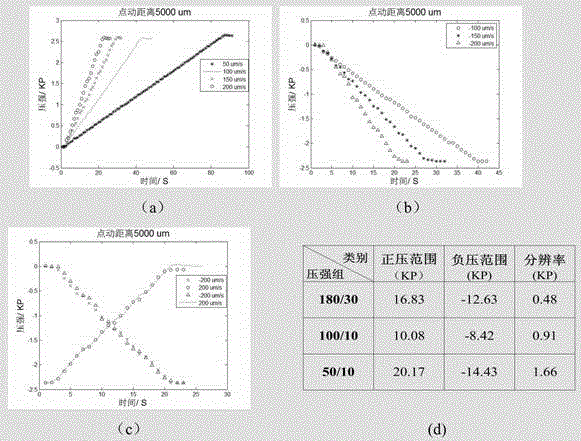
[0032] First, the gas circuit part includes: a small syringe and a large syringe connected to each other by a connecting pipe and a joint. After the pressure accumulation of the large syringe, the volume change of the small syringe causes a small pressure change, thereby improving the resolution;
[0033] For specific operations, prepare the required types of syringes, connecting tubes, connectors, etc., such as but not limited to spiral syringes, 1 / 16inch silicone tubes, Luer connectors, etc.; connect the basic materials as needed (see figure 1 ). Among them, the joint is preferably one model larger than the hose.
[0034] Second, the mechanical structure part: as attached fig...
PUM
| Property | Measurement | Unit |
|---|---|---|
| volume | aaaaa | aaaaa |
| volume | aaaaa | aaaaa |
| volume | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com