Lane keeping assist device
A technology for auxiliary devices and lanes, which is applied to vehicle components, transportation and packaging, steering mechanisms, etc., and can solve the problems that steering control should not be canceled, control torque can be canceled, and control torque cannot be increased.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
[0022] Hereinafter, Embodiment 1 of the present invention will be described based on the drawings. However, in this embodiment, a white line drawn on a road is called a lane boundary line, and a space between the lane boundary line and the lane boundary line is called a lane.
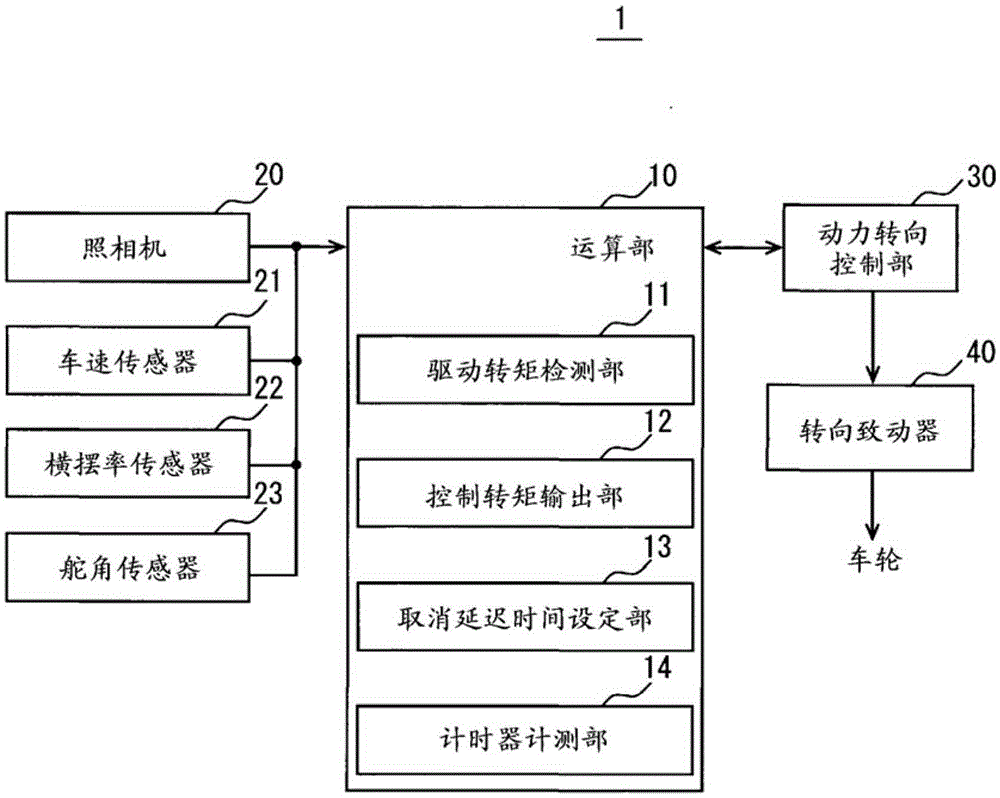
[0023] figure 1 The overall configuration of the lane keeping assist system 1 according to the present embodiment is shown. The lane keeping assist system 1 is mounted on a vehicle such as a passenger car, and assists the driving of the driver so that the own vehicle (the vehicle equipped with the lane keeping assist system 1 ) can maintain the lane defined by the left and right lane boundary lines and travel. operating system.
[0024] In detail, the lane keeping assist system 1 such as figure 1 As shown, it is equipped with a calculation unit 10 functioning as the lane keeping assist device of the present invention, a camera 20, a vehicle speed sensor 21, a yaw rate sensor 22, a steering angle sens...
Embodiment approach 2
[0063] Next, Embodiment 2 will be described. Note that, in the following description of the second embodiment, elements having the same reference numerals as those used heretofore are the same as those in the previous embodiments except when specifically mentioned. In addition, when only a part of the configuration is described, the embodiments described above can be applied to other parts of the configuration.
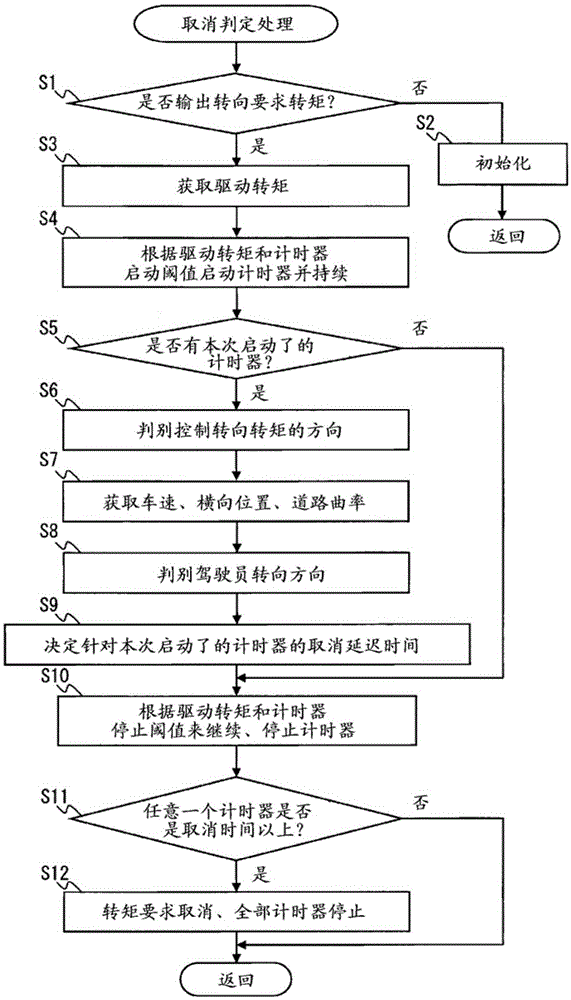
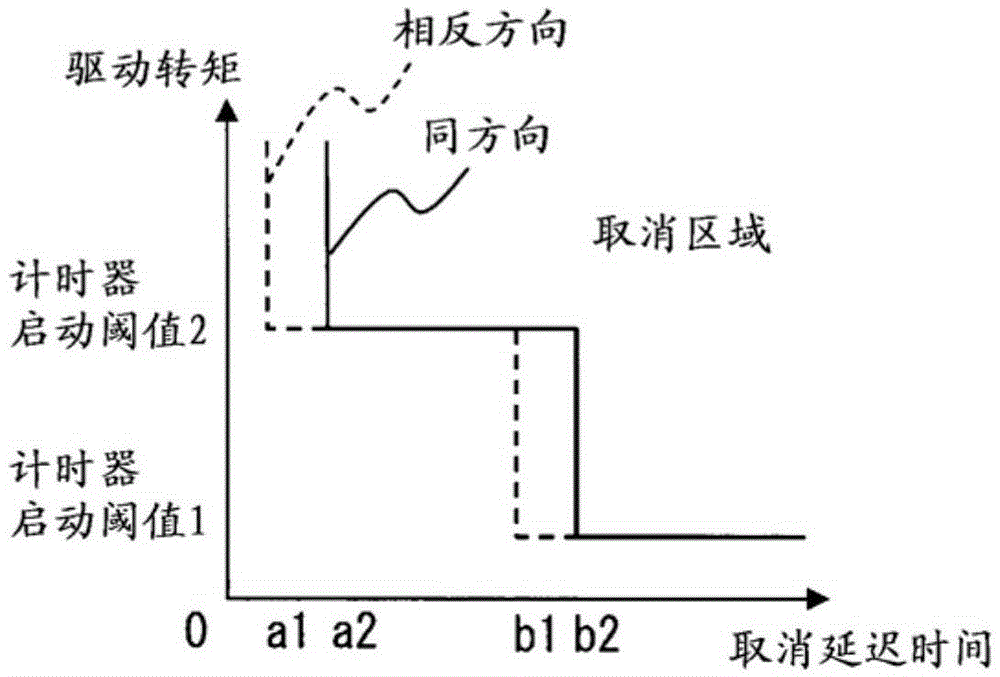
[0064] In Embodiment 1, the steering request torque is cancelled, based on the period in which the drive torque becomes equal to or greater than the threshold value exceeds the cancel delay time. That is, the cancellation is judged based on the time. In contrast, in Embodiment 2, the cancellation is determined based on the torque integral value.
[0065] Figure 5An overall configuration of a lane keeping assist system 1A according to Embodiment 2 is shown. As shown in the figure, the calculation unit 10A in Embodiment 2 includes a cancel integral value setting un...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com