Extended high-gain observer based disturbance estimation method for gyrowheel system
A technology of high-gain observer and gyro flywheel, applied in the field of inertial navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
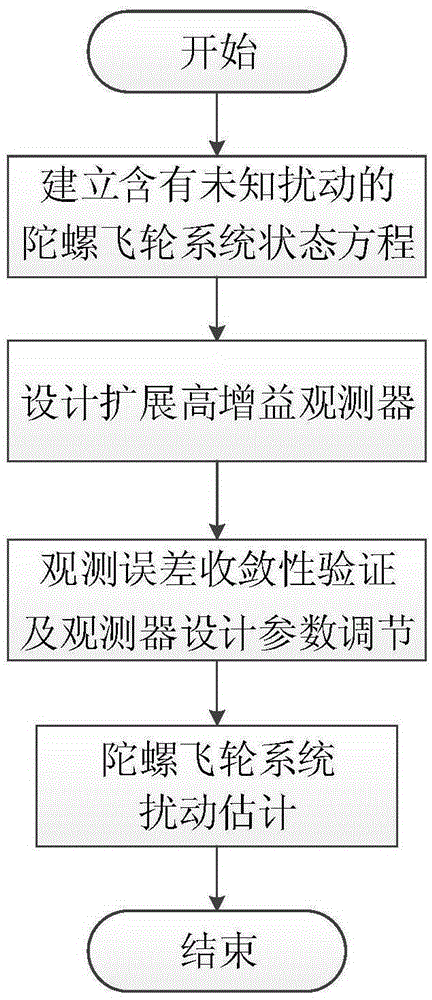
[0083] Embodiment 1: In this embodiment, the method for estimating the disturbance of the gyro-flywheel system based on the extended high-gain observer is implemented according to the following steps:
[0084] Step 1, according to the dynamic equation of the gyro flywheel system, establish the state equation of the gyro flywheel system containing unknown disturbance;
[0085] Step 2. Design an extended high-gain observer according to the state equation of the gyro-flywheel system containing unknown disturbances;
[0086] Step 3. Observation error convergence and observer design parameter ε adjustment;
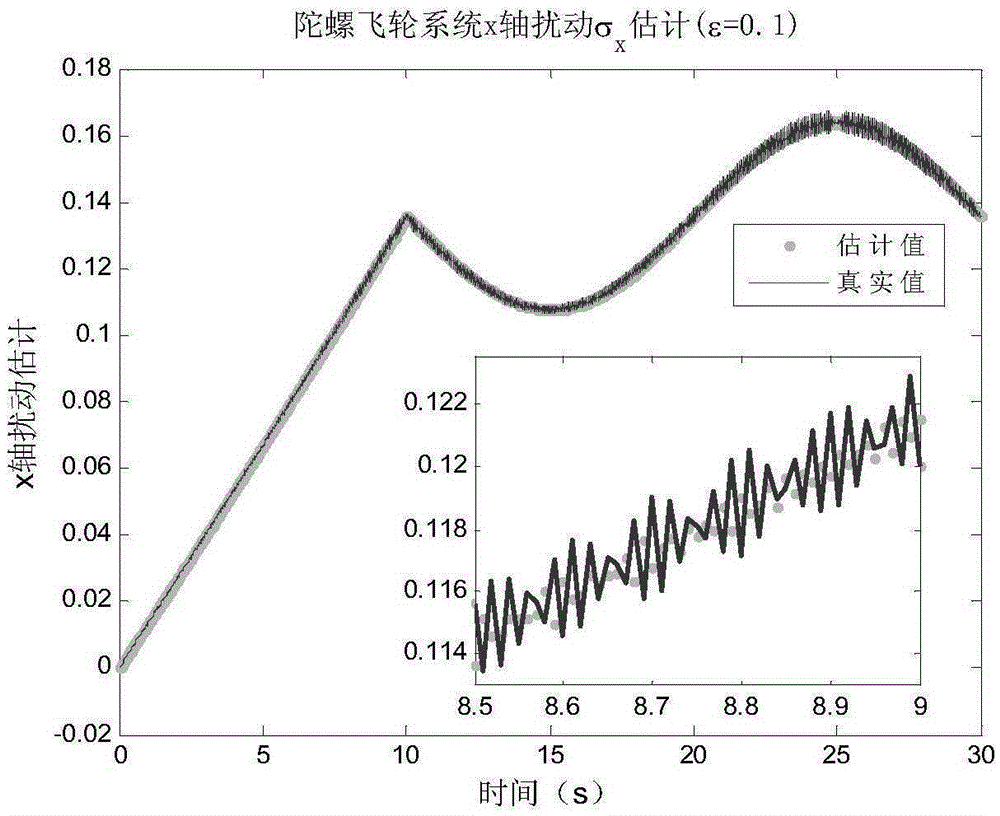
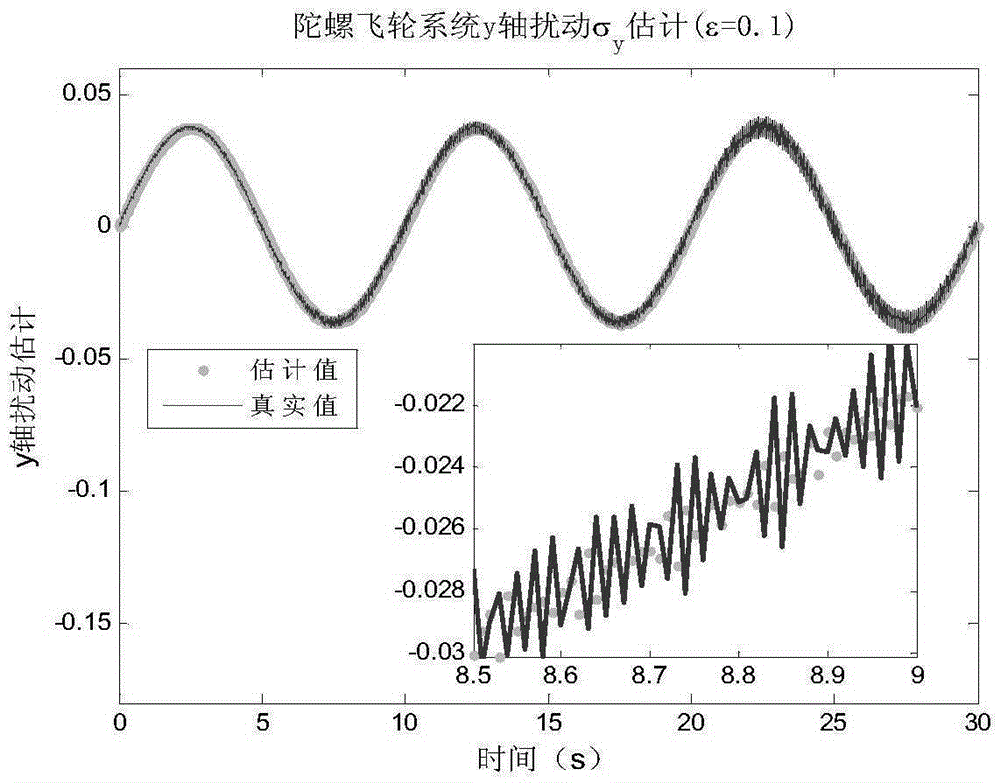
[0087] Step 4, realize the disturbance estimation of the gyro flywheel system.
specific Embodiment approach 2
[0088] Specific embodiment two: the difference between this embodiment and specific embodiment one is: it is characterized in that, described step one contains the gyro flywheel system state equation of unknown disturbance and realizes according to the following steps:
[0089] The tilt angle of the gyro flywheel rotor in the two-dimensional direction (φ x ,φ y ) and roll angular velocity As state variable x: x = x 1 x 2 x 3 x 4 T = φ x ...
specific Embodiment approach 3
[0116] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is that it is characterized in that the design of the extended high-gain observer in step two is realized according to the following steps:
[0117] Using the measurement equation y=Cx, realize the state variable x and the nonlinear disturbance term σ d For the estimation of (x,t), the extended high-gain observer is designed as follows:
[0118] x ^ · = A x ^ + B [ f ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com