


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Constant false alarm detection method for automotive millimeter wave anti-collision radar based on autoregressive time series model
A time series model, constant false alarm detection technology, applied in the field of constant false alarm detection, can solve the problem of sacrificing the real-time performance of vehicle-mounted millimeter-wave radar system, achieve good applicable value, good accuracy and real-time performance, increase stability and reliability. The effect of reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0024] A constant false alarm detection method for a vehicle-mounted millimeter-wave anti-collision radar based on an autoregressive time series model, comprising the following steps:
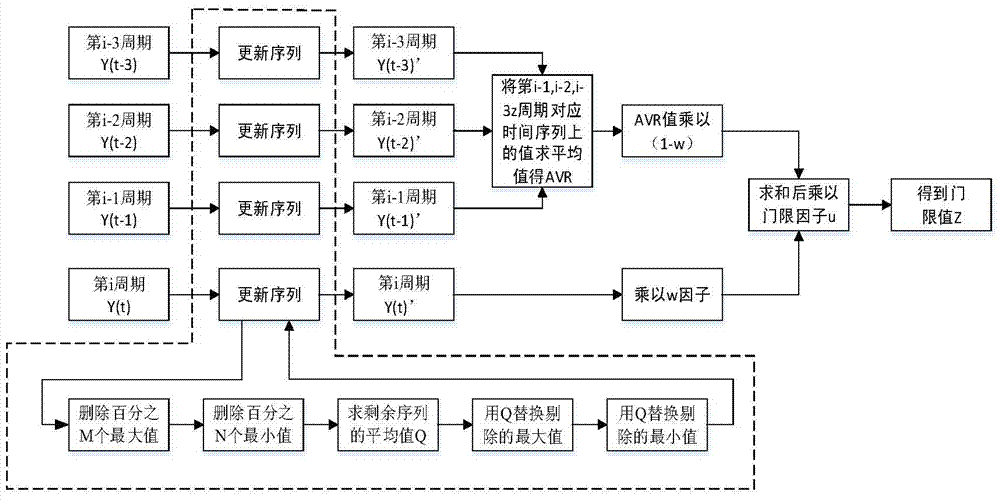
[0025] S1. The echo received by the millimeter wave radar signal, in N FFT Fast Fourier transform is performed on the points to get N in each time period FFT The value after the fast Fourier transform of the point, as a time series of each time period;
[0026] S2. For the current threshold time series Y n (t)(t≥4) and the time series Y of the first three time periods of the series n (t-1), Y n (t-2), Y n (t-3) Perform data update respectively, and obtain the new time series Y′ corresponding to the current threshold time series and the time series of the first three time periods of the series respectively n (t), Y' n (t-1), Y' n (t-2), Y' n (t-3).
[0027] S3. Calculate the mean value of the new time series corresponding to the time series of the first three time periods of the current...
Embodiment 2
[0032] The difference from Embodiment 1 is that the method also includes the following steps: S5. Obtaining the final threshold value Y n_mx :
[0033] Y n_mx =Y n_yz ×μ, μ is the threshold adjustment factor.
[0034] Since in embodiment 1, the calculated threshold may only be not much larger than the original data, it is easy to have a certain false alarm rate, so the threshold is increased by the threshold adjustment factor, which can effectively reduce the false alarm rate.
Embodiment 3
[0036] The method for updating the time series in step S2 in the above two embodiments is:
[0037] S2.1. Sort the current time series in ascending order and delete the maximum value Y of M percent of the series max_M% (t) Or directly delete the M maximum values, and delete the minimum value Y of N percent of the sequences at the same time min_N%(t) Or directly delete the N minimum fingers, M represents the M maximum values after the sorted sequence, and N represents the N minimum values before the sorted sequence;
[0038] S2.2. Calculate the mean Y for all values of the remaining time series Q (t);
[0039] S2.3. Use the calculated average value Y Q (t) Replace the deleted maximum and minimum values to complete the update of the current time series.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com