A method for emergency avoidance of unmanned vehicles
An unmanned vehicle and emergency avoidance technology, which is applied to the driver input parameters, vehicle components, external condition input parameters, etc. Clear, Feasible Results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment approach
[0107] Suppose the vehicle in front is A C Do uniform deceleration exercise. Based on the above information, use the lane change method in the patent application number 201510381349.9 to formulate a plan, and if feasible, execute the lane change operation. If the conditions for changing lanes are not met or there is an unexpected situation when changing lanes, the parking scheme will be used for emergency avoidance. The specific calculation method is as follows:
[0108]Based on the above conditions, the total braking distance S of the vehicle in front can be obtained C and braking time T C :
[0109]
[0110]
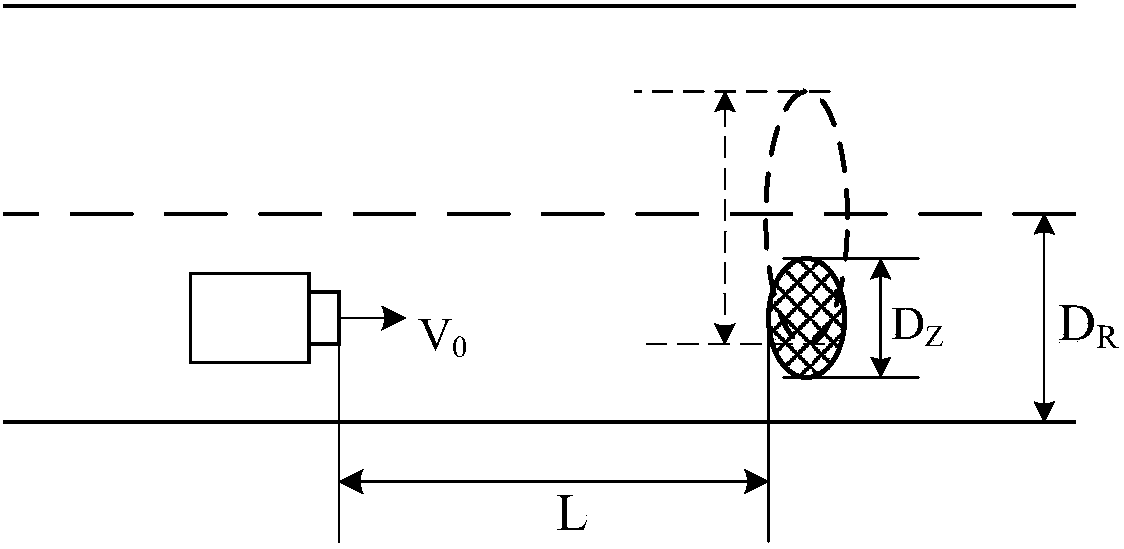
[0111] According to the above conditions, it can be assumed that the vehicle in front is located in front of the vehicle L 1 (L 1 =L'+S C ) for static obstacles at ), the scheme calculation refers to Figure 3A The method shown was developed.
[0112] From the above scheme planning and calculation process, it can be seen that there is a dynamic obstacle d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com