


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Time and fuel pulse optimal traversal method for observing local scope of spatial target during on-orbit service of spacecraft
A local-scale, space-observing technology, applied to instruments, three-dimensional position/course control, adaptive control, etc., can solve the problems of increased mission execution time, spacecraft mass and volume limitations, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
[0032] Specific implementation mode 1: The time and fuel pulse optimal traversal method of a spacecraft on-orbit service observation space target local range according to this implementation mode is specifically prepared according to the following steps:
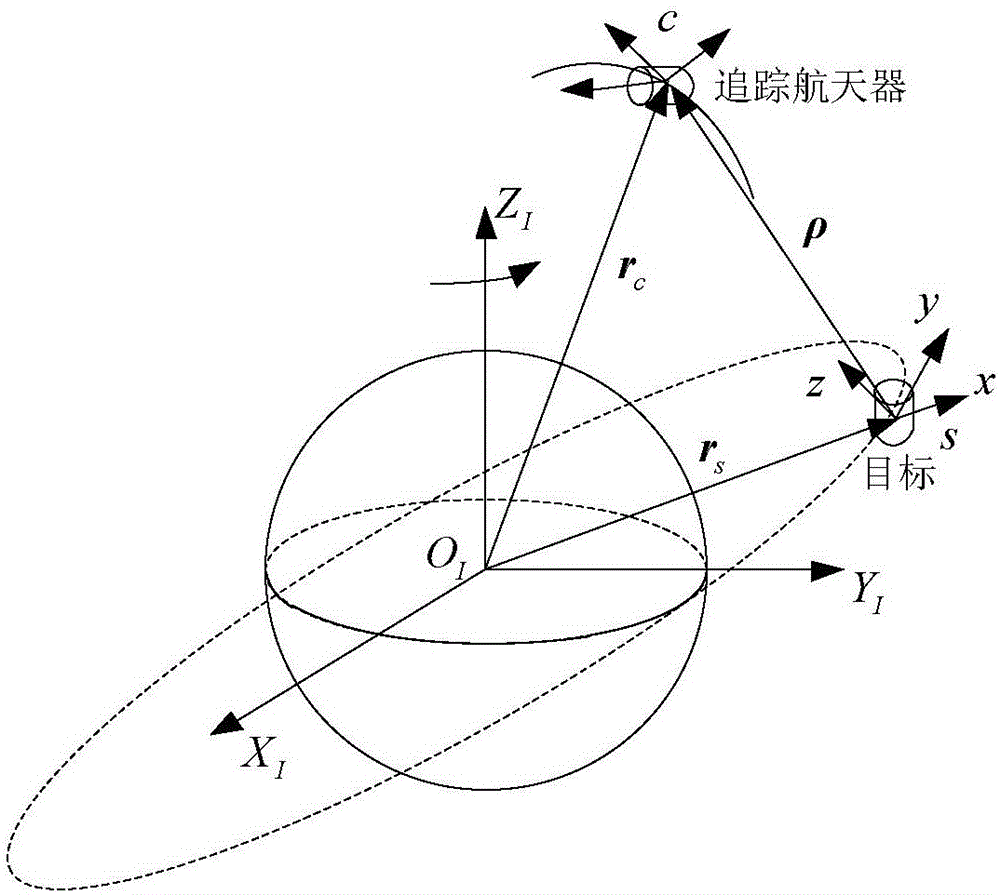
[0033] Step 1. Without considering the perturbation, when the target s is in a circular orbit, the relative orbital motion model of the tracking spacecraft is obtained and described as the C-W equation; according to the C-W equation, the relative position r(t) and relative velocity of the tracking spacecraft are obtained The state transition equation of ;
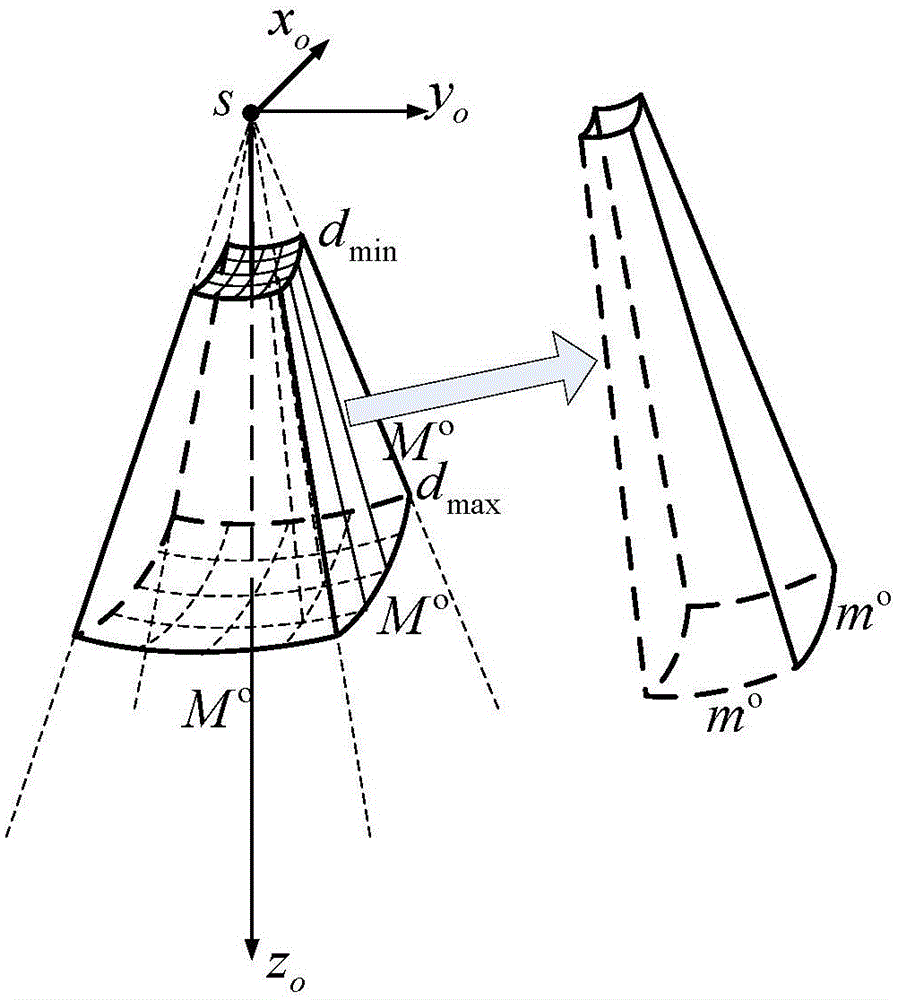
[0034] Step 2. Determine the direction of the center of the local range to be observed as the direction of the observation center line according to the task requirements. In two mutually perpendicular directions in a plane perpendicular to the observation center line, there is an angle range of M°, and the M° angle The range of angles is equally divided into l×l subdivid...
specific Embodiment approach 2
[0046] Specific embodiment two: the difference between this embodiment and specific embodiment one is: in step one, when the perturbation is not considered, when the target s is in a circular orbit, the relative orbital motion model of the tracking spacecraft is described as a C-W equation; According to the C-W equation, the relative position r(t) and relative velocity of the tracking spacecraft are obtained The specific process of the state transition equation is:
[0047] Let the target be s, and the tracking spacecraft be c; let the spacecraft serve the observation space target in orbit, that is, the target s is in a near-circular orbit, and take the orbital coordinate system s-xyz of the target as the relative motion coordinate system; the relative motion coordinate system The origin is fixed to the center of mass of the target and moves along the orbit with the center of mass of the target, the x-axis of the relative motion coordinate system and the geocentric vector r o...
specific Embodiment approach 3
[0068] Embodiment 3: The difference between this embodiment and Embodiment 1 or 2 is that the traversal order of the spiral form in Step 3 is specifically:
[0069] When l is an even number, the starting grid selects any vertex of the four vertex grids in all subdivided grids, and then performs the traversal of the helical form of the precession form in the clockwise or counterclockwise direction;
[0070] If any one of the four grids in the middle of all the subdivision grids is selected, the helical traversal of the unscrewed form is performed in a clockwise or counterclockwise direction;
[0071] There are a total of 16 optional traversal sequences for spiral traversal in the form of precession and spiral traversal in the form of precession, and one of the 16 optional traversal sequences can be selected arbitrarily according to the actual situation;
[0072] Taking the subdivision grid when l is an even number as an example, the starting grid can choose A, B, C, D, E, F, G,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com