Leg configuration for rotatably driven three-dimensional walking robot
A walking robot and rotary drive technology, applied in the field of robots, can solve the problems of power distribution and unevenness of the impact-resistant drive, and achieve the effects of simple structure, light weight of legs, and reduction of mass and rotational inertia.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
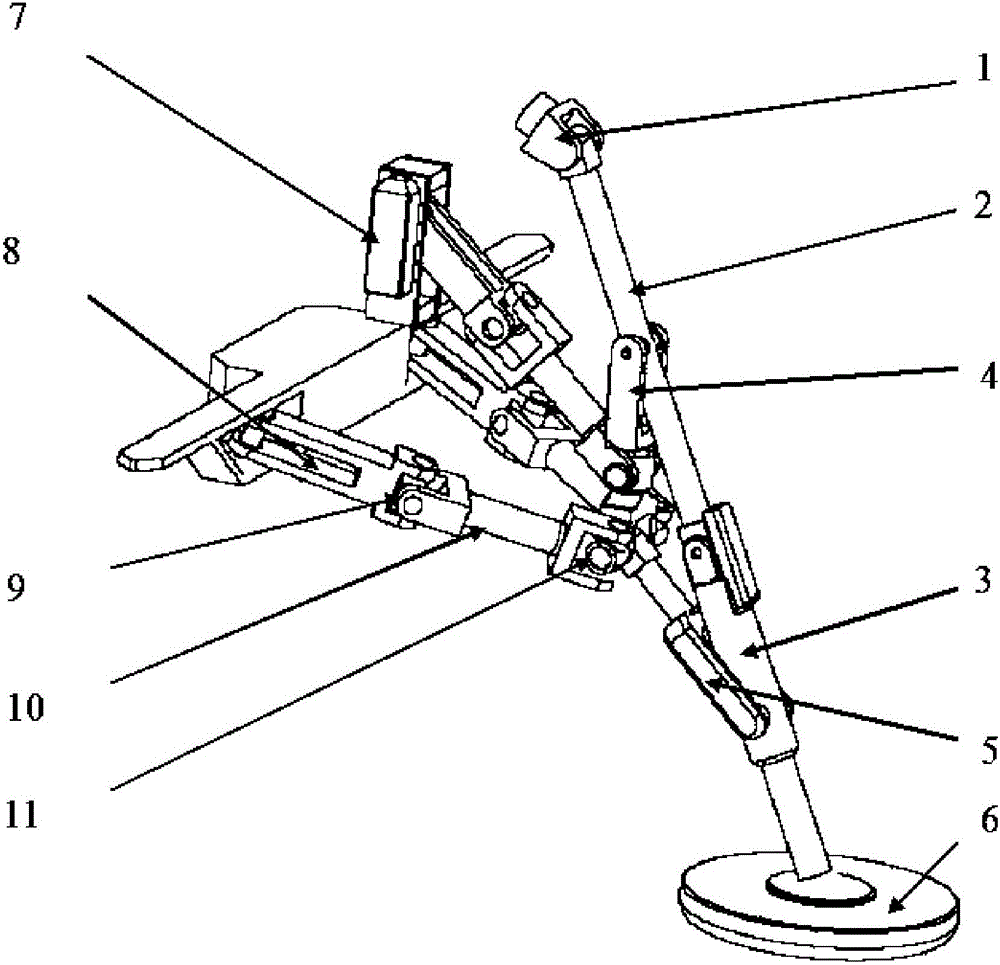
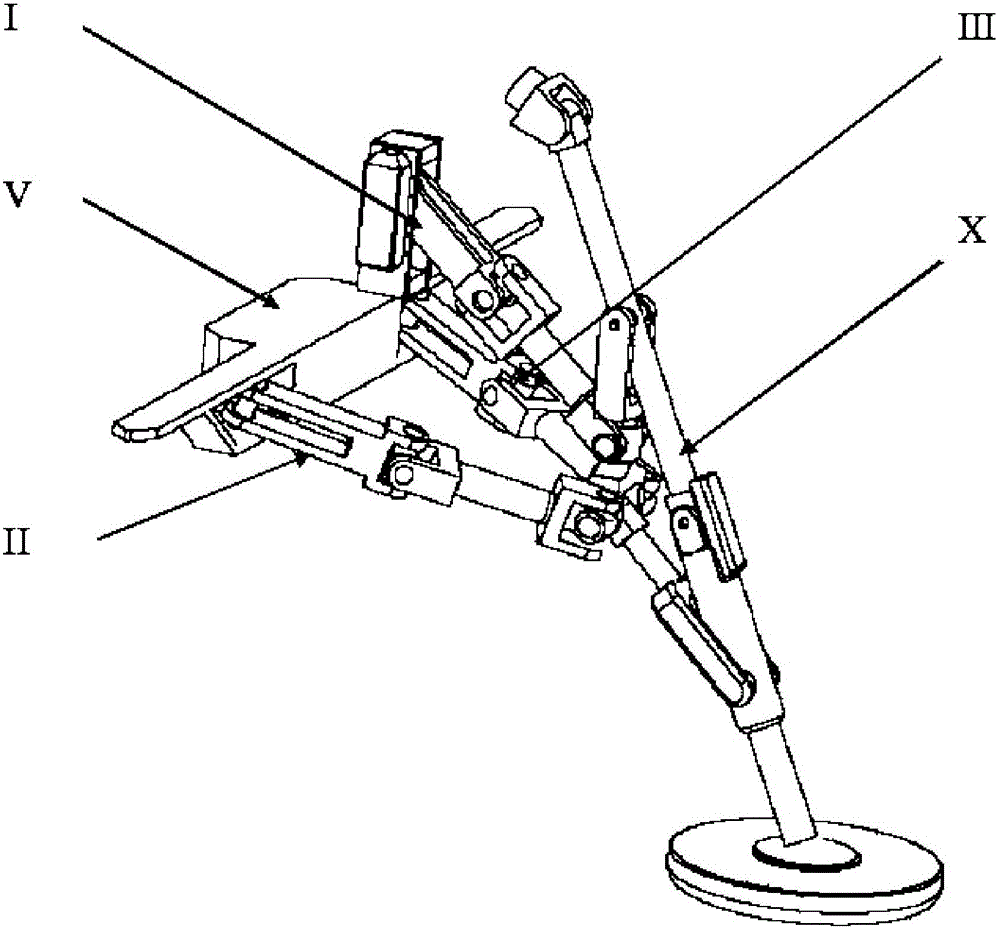
[0038] This embodiment provides a rotationally driven three-dimensional walking robot leg configuration, including: a frame, a leg telescopic mechanism, a parallel drive mechanism, and a rotational drive mechanism; the rotational drive mechanism is drivingly connected to the parallel drive mechanism, and the The parallel driving mechanism is drivingly connected with the leg telescopic mechanism; among them:
[0039] The side swing block 1 is connected to the frame V through a rotating hinge a to realize the left and right swing of the legs, and then is connected to the swing lever 2 through an orthogonally arranged rotating hinge b to realize the front and back swing of the leg telescopic mechanism. The swing lever 2 passes The rotating hinge c is connected to the transmission rod a4, the transmission rod a4 is connected to the transmission rod b5 through the rotation hinge d, the transmission rod b5 is connected to the calf rod 3 through the rotation hinge e, and the calf rod 3 i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com