An adaptive wind-resistant path tracking control method for unmanned airship
A path tracking and unmanned airship technology, applied in three-dimensional position/channel control and other directions, can solve problems such as not considering the external wind field, achieve the effect of ensuring global asymptotic stability, improving tracking performance, and eliminating path tracking errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] Below in conjunction with accompanying drawing, each part design method in the present invention is further described:
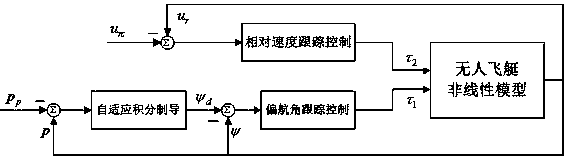
[0043] "A self-adaptive wind-resistant path tracking control method for unmanned airship" of the present invention, see figure 1 As shown, the specific steps are as follows: Step 1: Given the expected tracking value
[0044] 1) Given the desired plane path is the path parameter, x p ,y p Desired position for the airship.
[0045] 2) Given the desired speed as u rc =C, C>0 is a constant.
[0046] Step 2: Adaptive integral guidance calculation
[0047] 1) Calculate the orientation angle of the desired path reference point
[0048] 2) Calculate the error between the current position of the airship and the reference point of the expected path [x,y] T is the current position of the unmanned airship.
[0049] 3) Calculate the adaptive law of wind field estimation k θx ,k θy>0 is an adaptive parameter, and the estimated value of the win...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com