Comprehensive re-setting control method for ship rudder stabilization
A control method and control algorithm technology, which can be applied to equipment that reduces the motion of ships, equipment that increases the stability of ships, ships, etc., and can solve the problems of uncertain structural model and increased yaw angle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention is described in more detail below in conjunction with accompanying drawing example:
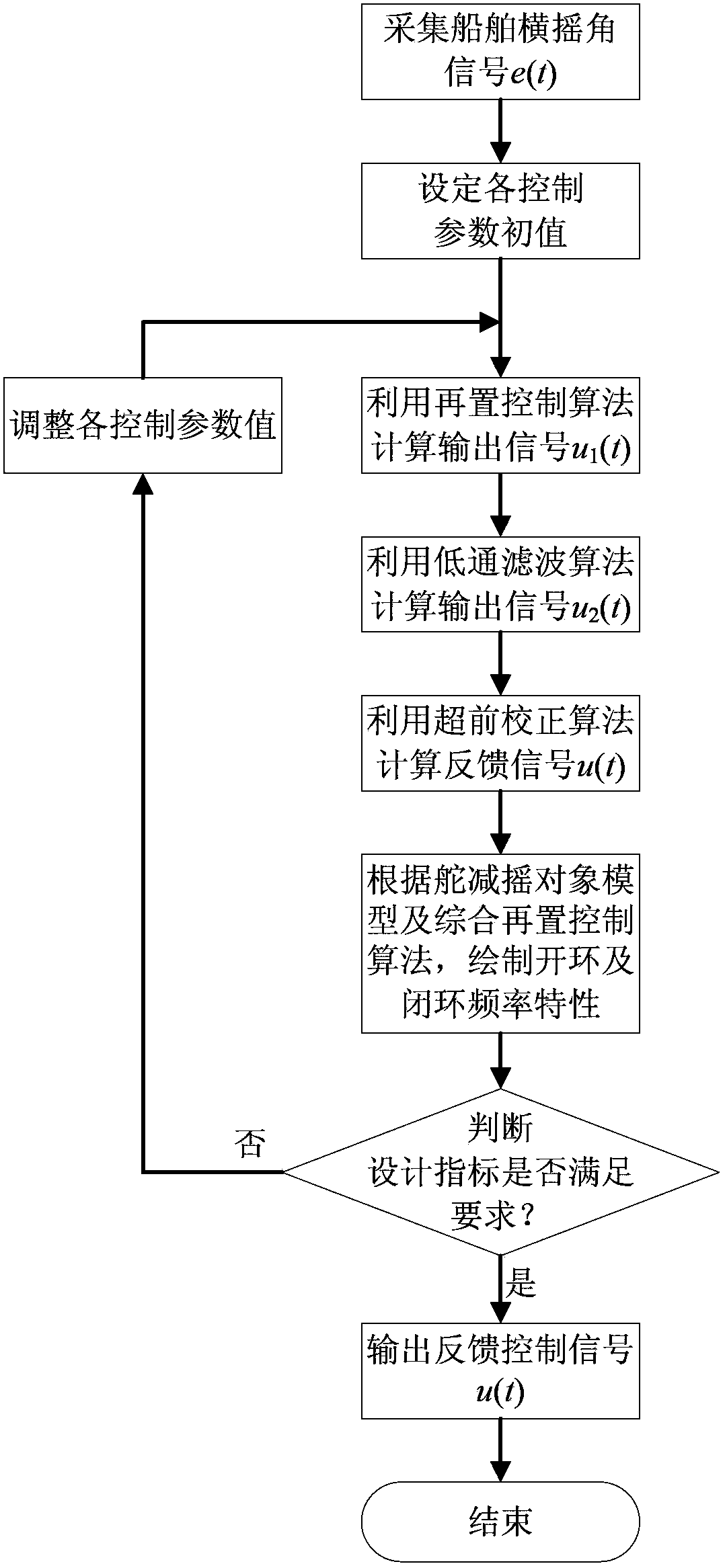
[0049] to combine Figure 1 ~ Figure 4 , the present invention comprises the following steps:
[0050] Step 1: collect the ship's roll angle signal e(t), and set the initial value of each control parameter.
[0051] Let the feedback coefficient ω p The initial value is 0.01rad / s, the differential time constant τ 1 =1 / (1.62ω p )≈61.73s;
[0052] Set filter time constant T f The initial value is 0.1;
[0053] Set the adjustable gain coefficient k 0 The initial value is 1, and the corner frequency is 1 / T 1 and 1 / T 2 The initial values are 10rad / s and 2rad / s respectively.
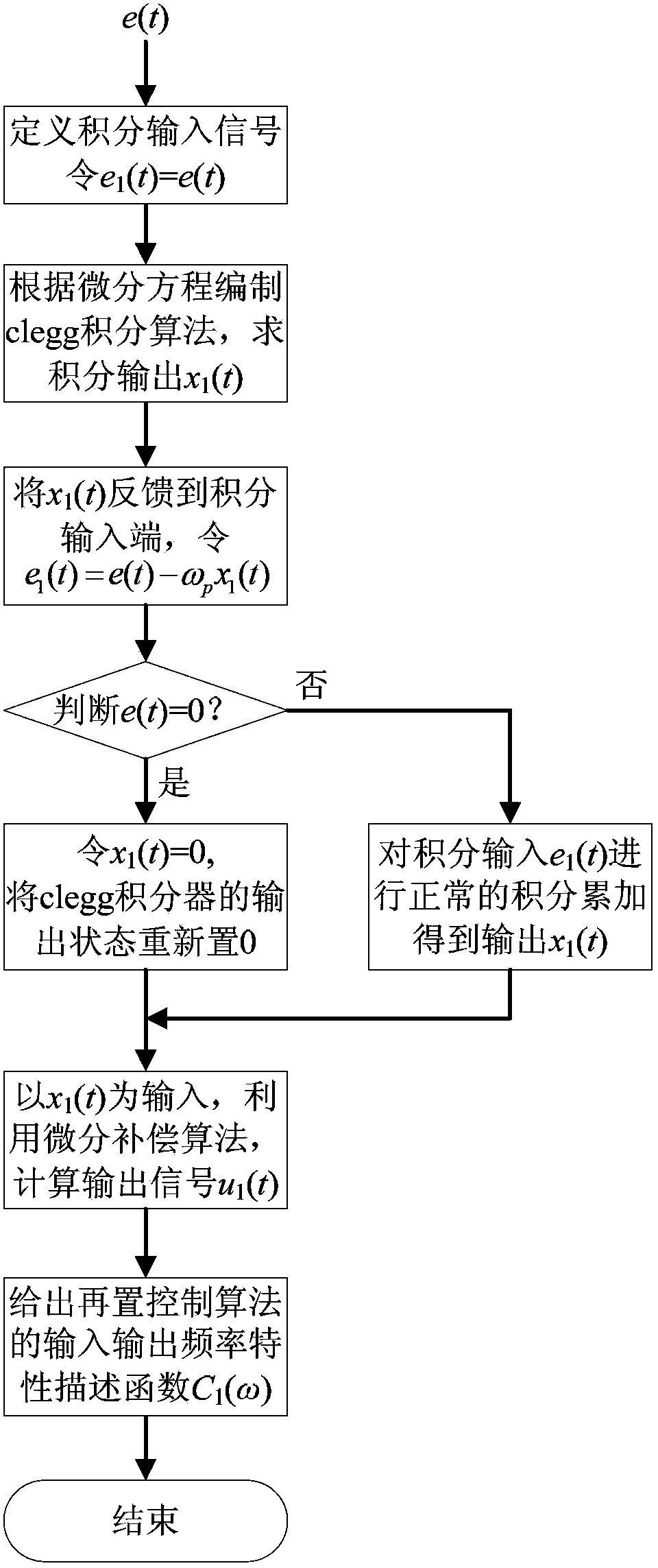
[0054] Step 2: Take the ship's roll angle e(t) as input, and use the reset control algorithm based on nonlinear integral (clegg integral) and differential compensation to calculate the output signal u 1 (t).
[0055] to combine figure 2 , the specific implementation process of the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com