Method for designing U-model anti-interference controller of continuous system based on standard form
A technology of continuous system and design method, applied in the direction of adaptive control, comprehensive factory control, general control system, etc., to achieve good robustness, reduce complexity and calculation amount, and avoid phase lag effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Further describe the present invention below in conjunction with accompanying drawing.
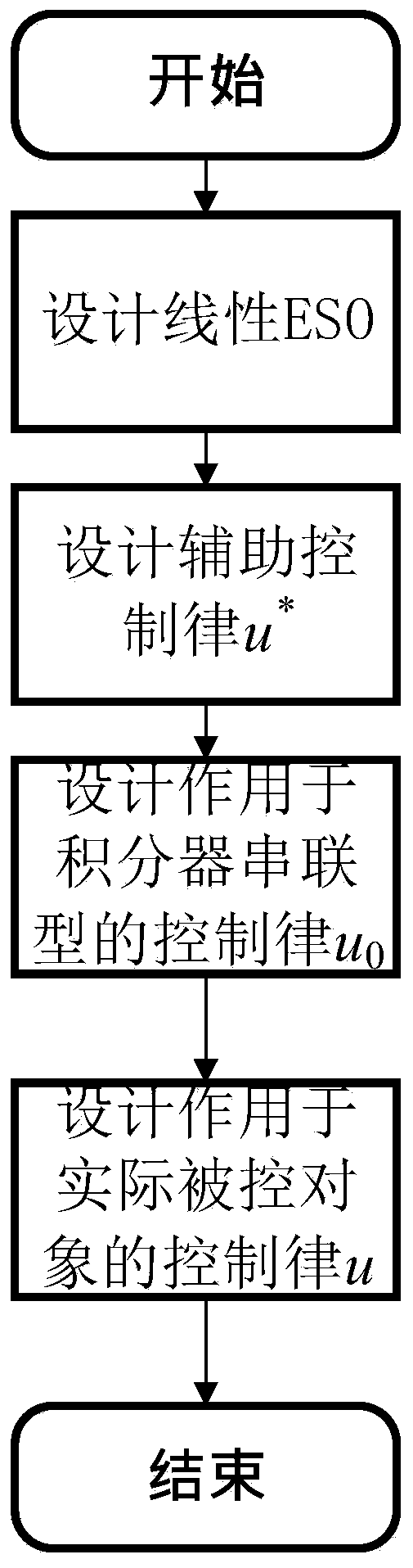
[0058] like figure 1 As shown, the standard type continuous system U-model controller design method based on the integrator series of the present invention comprises the following steps:
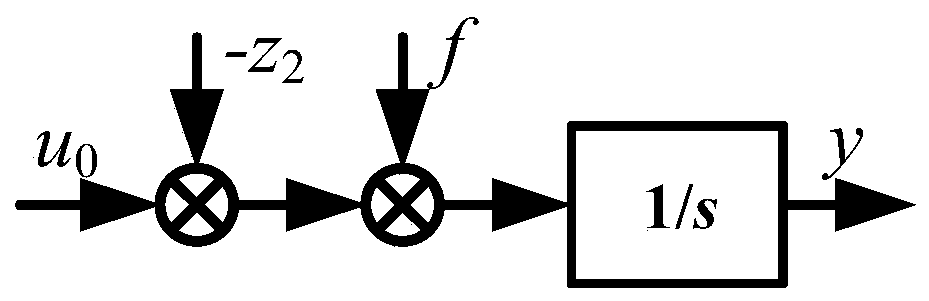
[0059] S1: Design a second-order ESO, estimate the total disturbance of the control system, use the control law to compensate the total disturbance in real time, and transform the controlled object into a standard type of integrator series. When the internal and external nonlinear and uncertain factors of the control system are estimated by the second-order ESO and compensated by the control law applied to the controlled object, any nonlinear controlled object can be transformed into a linear integrator series object, Lay a solid foundation for subsequent controller design.
[0060] The equivalent system structure corresponding to the second-order ESO is as follows figure 2 As shown, in the fi...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap