A Design Method of U-Model Anti-disturbance Controller Based on Standard Form for Continuous System
A continuous system and design method technology, applied in the direction of adaptive control, comprehensive factory control, general control system, etc., to avoid phase lag, good robustness, and reduce impact.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
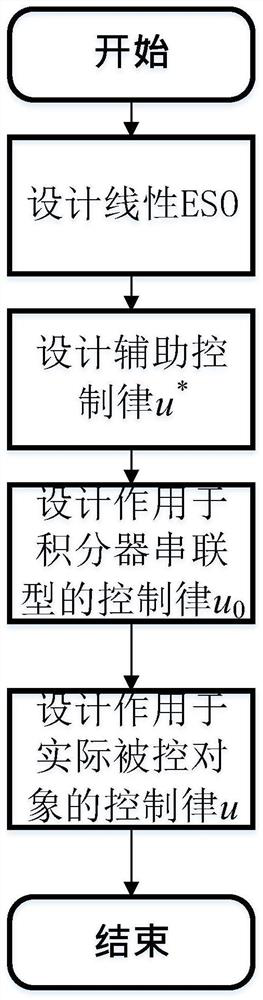
[0057] The present invention is further described below in conjunction with the accompanying drawings.
[0061]
[0065]
[0068]
[0069] So,
[0070]
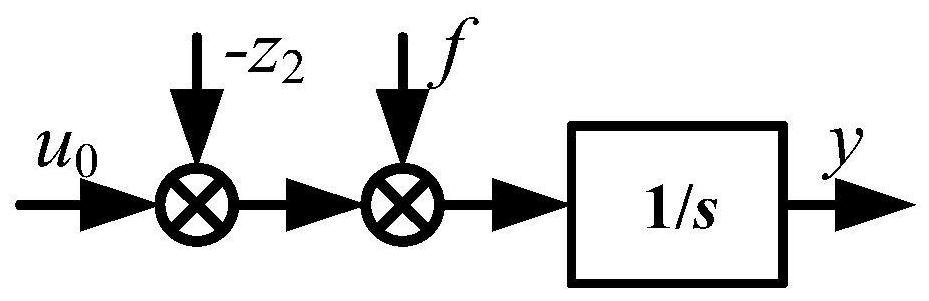
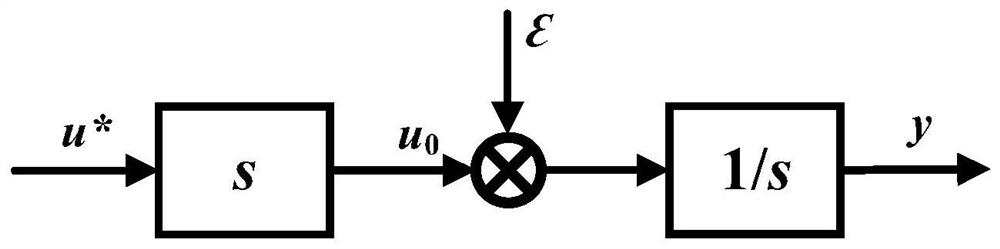
[0071] On this basis, it is equivalent to connect a differentiator in series in the system on the basis of formula (3). this
[0072] y=u
[0076]
[0081]
[0082]
[0085]
[0087] The error finite-time convergence is proved below:
[0089]
[0091]
[0095] It has been shown that the control deviation converges to 0 in a finite time when the adjustable parameters k, ρ satisfy the stability condition. definition
[0097]
[0099]
[0100] Shift term processing of equation (8) and use substitution to define P(t)=kε
[0101]
[0103]
[0105]
[0108]
[0109] Among them, M(∞) represents the value of M(t) when t tends to positive infinity; P(∞) represents the value of P(t) when t tends to positive infinity.
[0112] 2. The size of the steady-state error depends on P(∞) and k, and the larger the k, the smaller the steady-state er...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com