Software receiver-based distributed deep integrated navigation method and system
A software receiver and deep integrated navigation technology, which is applied in the field of satellite navigation, can solve the problems of poor dynamic tracking performance of the receiver, large tracking error of the GNSS receiver, and low positioning accuracy, so as to suppress the influence of noise and multipath effect, The effect of improving dynamic tracking performance and reducing tracking error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
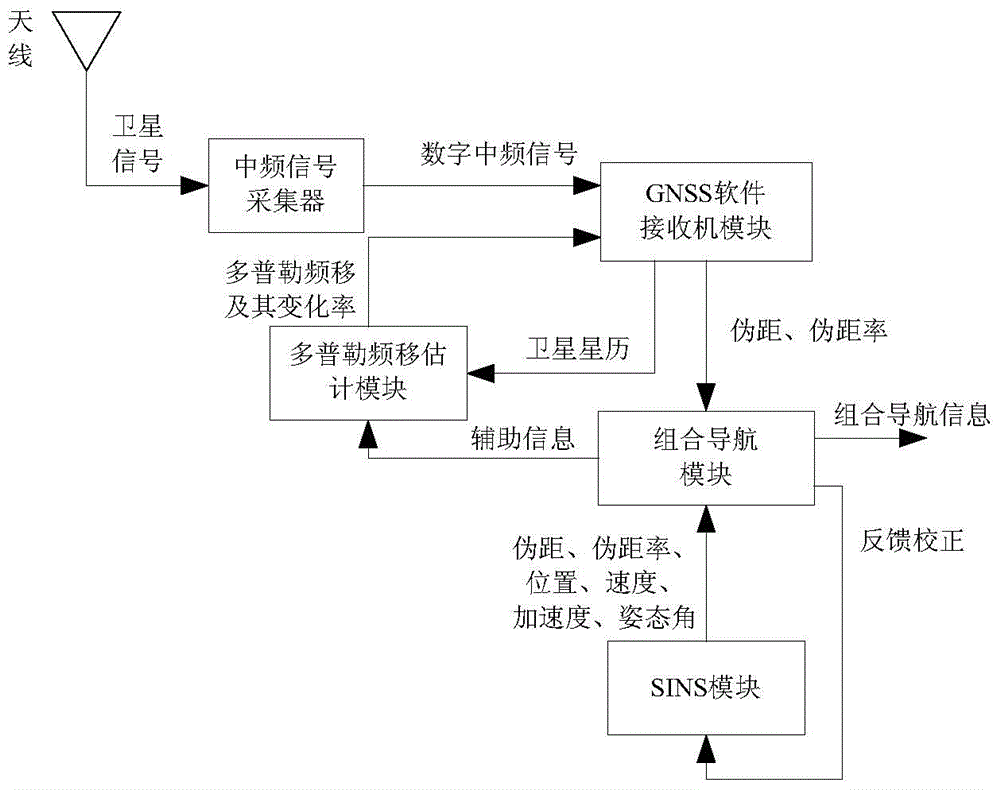
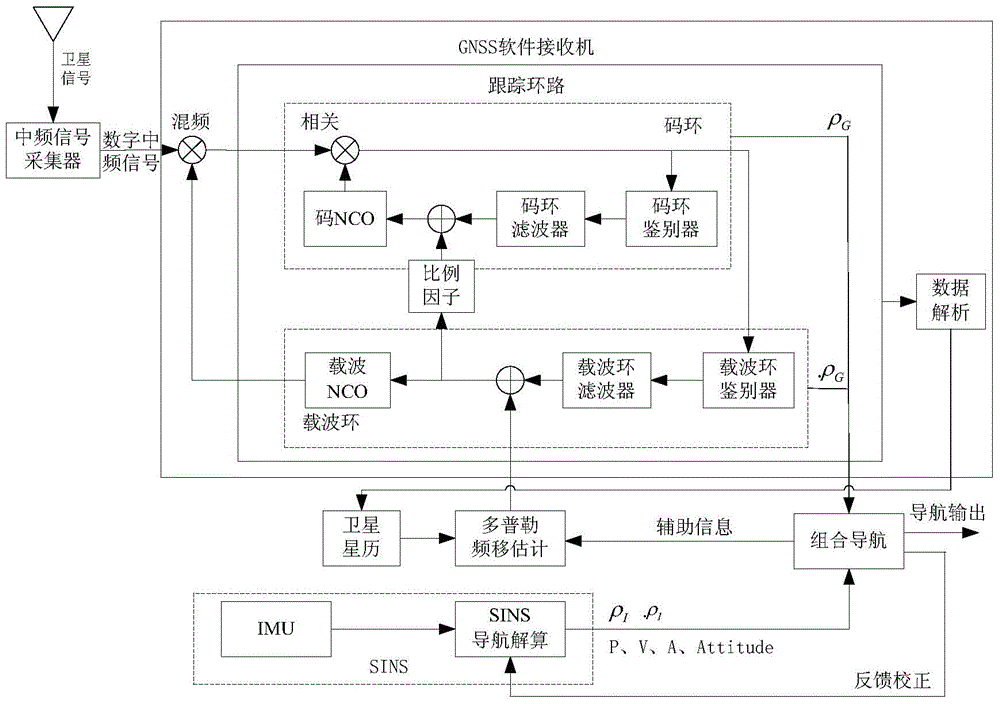
[0017] The distributed deep integrated navigation system of the present invention includes an intermediate frequency signal collector, a Doppler frequency shift estimation module, a SINS module, a GNSS software receiver module and an integrated navigation module.
[0018] 1. IF signal collector
[0019] The intermediate frequency signal collector performs down-conversion and digital processing on the received satellite signals, generates digital intermediate frequency signals and saves them as binary files, and provides them to the GNSS software receiver module for use.
[0020] 2. Doppler frequency shift estimation module
[0021] The Doppler frequency shift estimation module predicts and obtains the three-dimensional position, velocity and acceleration information of the carrier at the current moment according to the three-dimensional position, velocity and acceleration auxiliary information of the carrier provided by the integrated navigation module at the previous moment; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com