


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Method for vehicle cooperative control at non-signaled intersection in vehicle networking environment
A collaborative control and intersection technology, applied to control traffic signals and other directions, can solve the problems of complex traffic characteristics and low safety level at unsignalized intersections
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
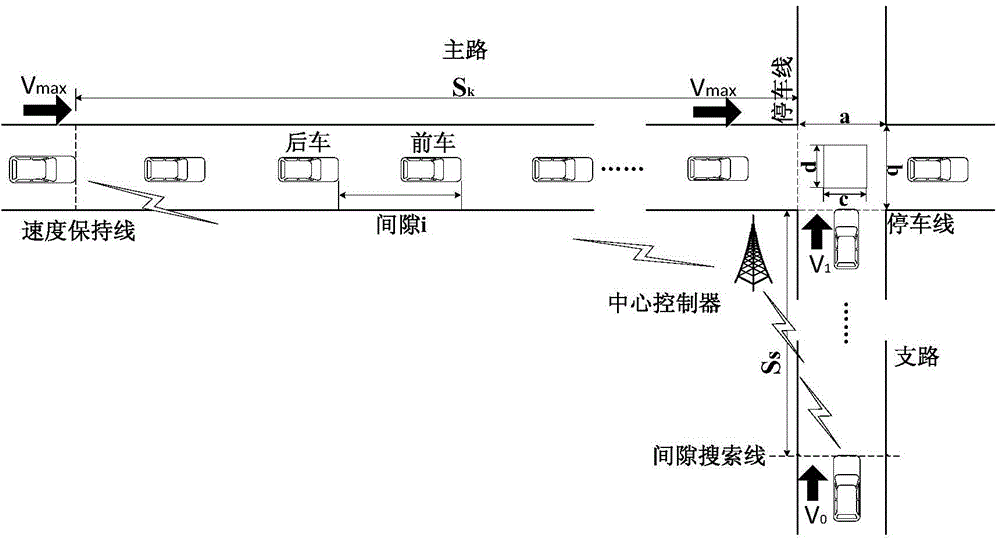
[0059] This embodiment is based on the following assumptions:
[0060] (1) The embodiment is in the environment of the Internet of Vehicles, and a central controller is set at an unsignalized intersection, and the required information can be transmitted through vehicle-vehicle communication and vehicle-road communication;
[0061] (2) The speed of information transmission and processing is fast enough compared to the speed of the vehicle, and the delay in the process is negligible;
[0062] (3) The vehicle can drive accurately and automatically under the control of the central controller;
[0063] (4) The communication range of the central controller is large enough to realize the process of coordinated control of the main road and branch road vehicles;
[0064] (5) The impact of pedestrians and non-motor vehicles is not considered.
[0065] In order to realize the coordinated control of vehicles on the main road and branch roads, the distance before the stop line at the int...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com