Human-simulated mechanical arm based on hybrid driving of various artificial muscles
A hybrid drive and artificial muscle technology, applied in the field of humanoid manipulators, can solve the problems of drive system limitation, power density reduction, transmission error, etc., and achieve the effect of high power density ratio, simple structure and good flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
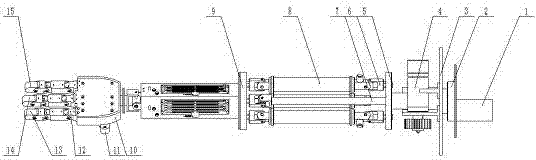
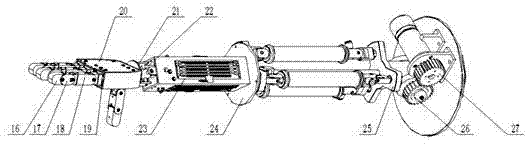
[0023] Figure 1 is a schematic diagram of the structure of a humanoid robotic arm driven by a variety of artificial muscles. The humanoid arm consists of a pan-tilt, PAM bionic elbow joint, SMA bionic wrist joint and IPMC bionic hand. The fixed platform 25 of the PAM bionic elbow joint is connected to the upper part 3 of the pan-tilt through the shaft 26, and the motor 1 and the motor 4 are matched with the gear transmission 27, so that the robot arm can realize pitch and yaw motion as a whole; the bionic elbow joint motion platform 9 The SMA bionic wrist joint movement platform 21 is fixedly connected with the wrist support 24 of the wrist joint by bolts; the SMA bionic wrist joint motion platform 21 is fixedly connected to the inner palm plate 10 of the IPMC bionic hand by threads.
[0024] PAM bionic elbow joints require a total of 7 Hooke hinges 6, of which 3 Hooke hinges 6 are placed on the fixed platform 25 in an equilateral triangle shape, and the other 3 Hooke hinges 6 are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com