A calibration-free visual servo control method for mold protection
A technology of visual servoing and control methods, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of camera Cartesian trajectory offset, lack of direct control of Cartesian space, etc., and achieve local minimum , to ensure the effect of smoothness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings.
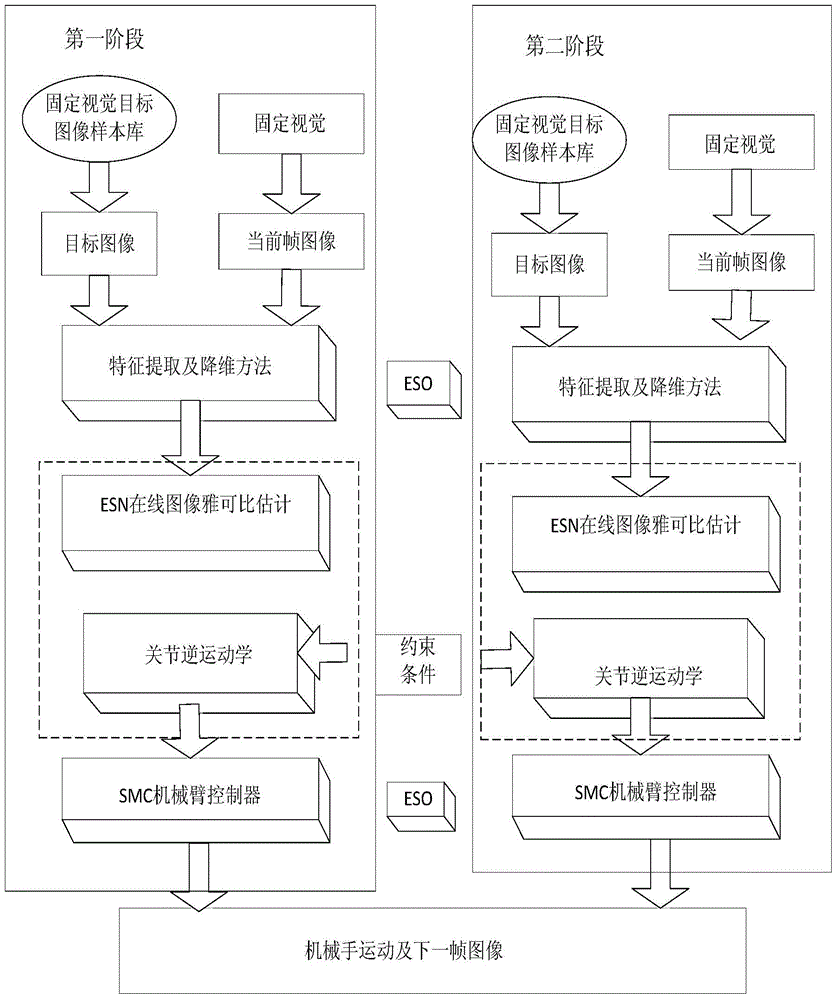
[0028] refer to Figure 1 to Figure 5, an uncalibrated visual servo control method based on echo state network estimation image Jacobian matrix for mold protection, including the following steps:
[0029] 1) Establish an image index area and a target image sample library. The task of the first phase of establishing the image index area and the target image sample library is to guide the manipulator to the grasping target area through fixed vision, so that the manipulator can be moved to the top of each index area in an offline state without precise alignment, as long as it is ensured The target can appear within the range of hand-eye vision, and then the corresponding image is collected through fixed vision and saved as the target image sample. The task of the second stage is to guide the manipulator to approach and aim at the target through hand-eye vision, to achie...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com