SIFT feature matching method based on OpenCL parallel acceleration
A feature matching and feature point technology, applied in the field of remote sensing mechanism, can solve the problems of long image matching calculation time, incompatible hardware platform, slow matching speed, etc., to achieve platform independence, obvious acceleration effect, and high total acceleration ratio. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
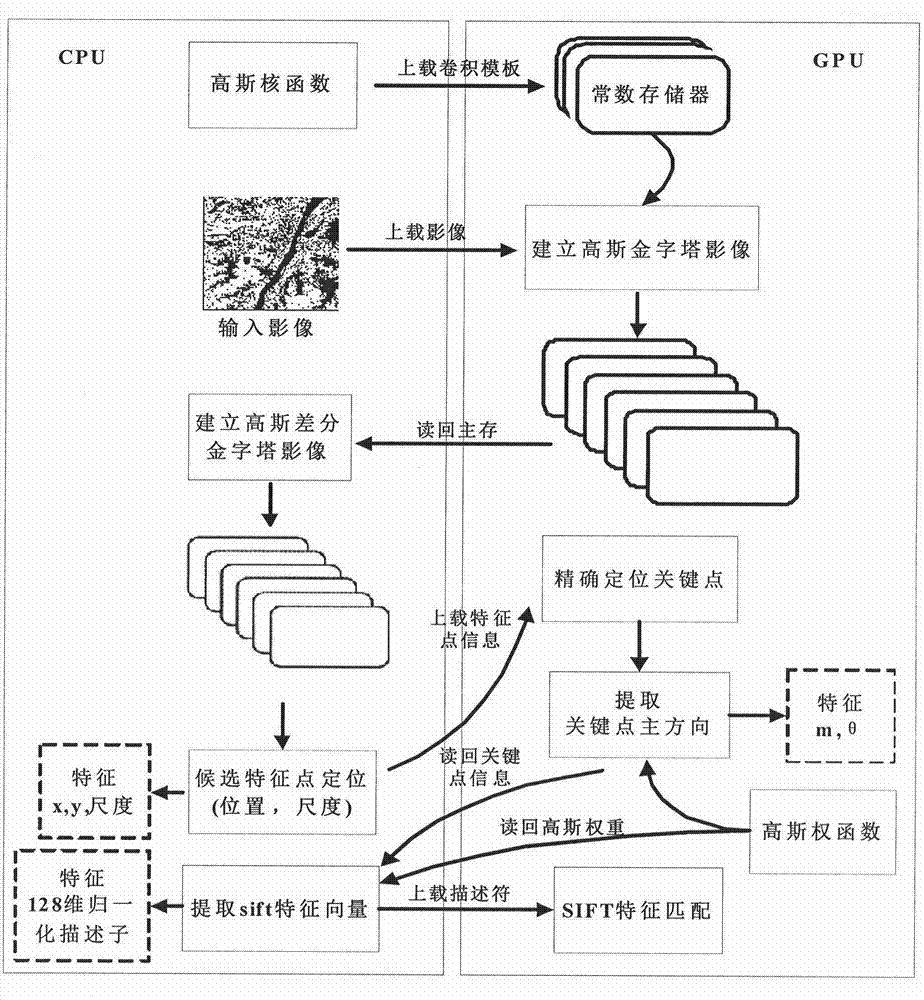
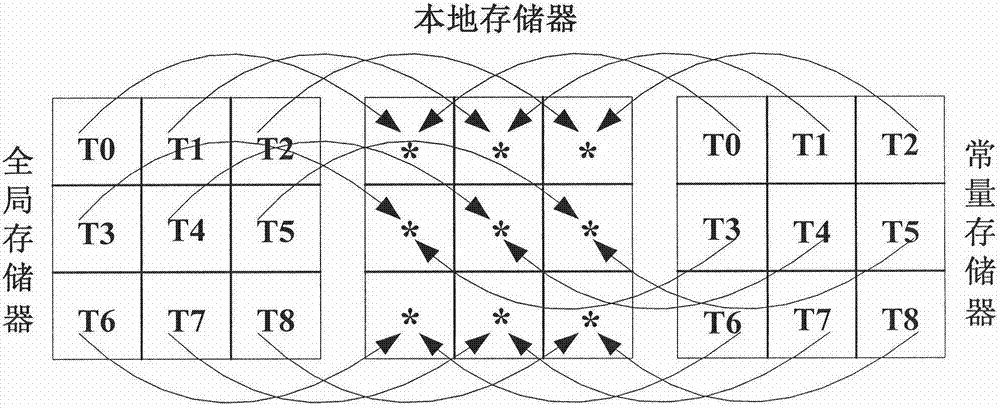
[0032] Such as figure 1 , figure 2 , image 3 , Figure 4 and Figure 5 As shown, a SIFT feature matching method based on OpenCL parallel acceleration, which includes SIFT feature matching parallel computing, OpenCL-based checkerboard convolution operation and task assignment and mapping of working nodes, the SIFT feature matching parallel computing includes the following step:
[0033] Step 1: First read the input image to the main memory, transfer the Gaussian kernel data of different scales from the main memory to the constant memory of the GPU, perform step-by-step continuous filtering in the GPU to accelerate the construction of the Gaussian scale space pyramid, and transfer the Gaussian kernel data to the constant memory of the GPU. The pyramid is stored in the global memory, and then the Gaussian pyramid image is read back to the CPU. Two Gaussian images of adjacent scales are subtracted to obtain the multi-scale space representation of the DOG pyramid. After uploa...
Embodiment 2
[0053] Such as figure 1 , figure 2 , image 3 , Figure 4 and Figure 5 As shown, a SIFT feature matching method based on OpenCL parallel acceleration, which includes SIFT feature matching parallel computing, OpenCL-based checkerboard convolution operation and task assignment and mapping of working nodes, the SIFT feature matching parallel computing includes the following step:
[0054] Step 1: First read the input image to the main memory, transfer the Gaussian kernel data of different scales from the main memory to the constant memory of the GPU, perform step-by-step continuous filtering in the GPU to accelerate the construction of the Gaussian scale space pyramid, and transfer the Gaussian kernel data to the constant memory of the GPU. The pyramid is stored in the global memory, and then the Gaussian pyramid image is read back to the CPU. Two Gaussian images of adjacent scales are subtracted to obtain the multi-scale space representation of the DOG pyramid. After uploa...
Embodiment 3
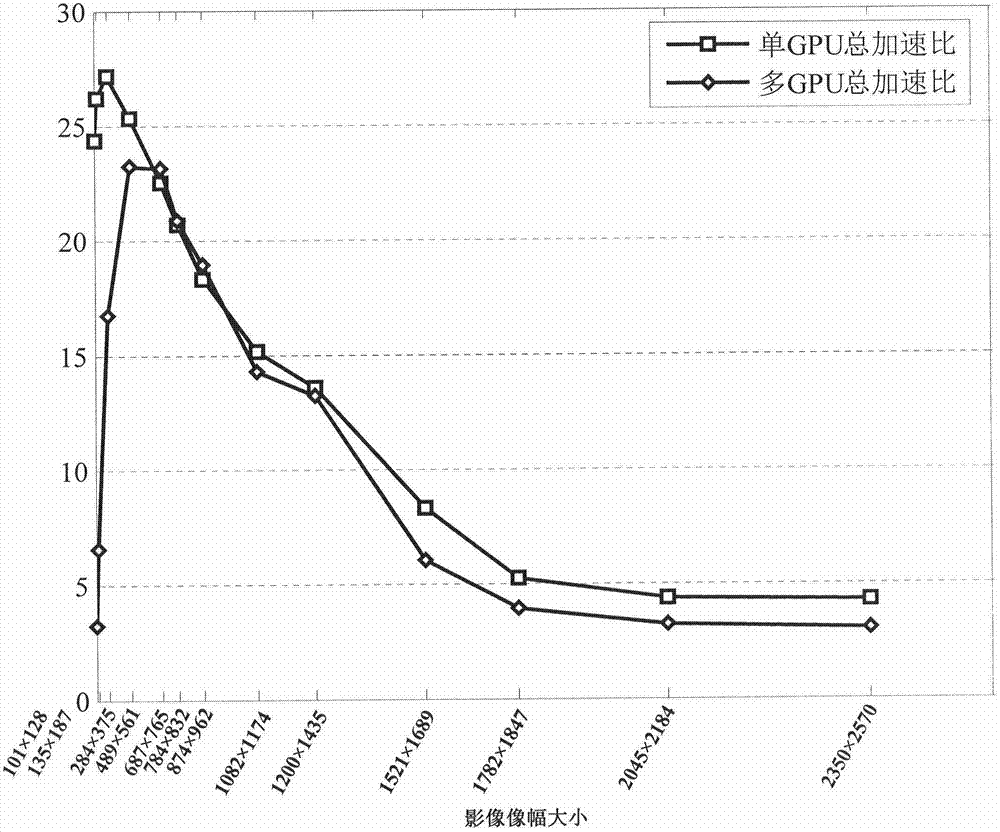
[0076] Such as figure 1 , figure 2 , image 3 , Figure 4 and Figure 5 As shown, a SIFT feature matching method based on OpenCL parallel acceleration, which includes SIFT feature matching parallel computing, OpenCL-based checkerboard convolution operation and task assignment and mapping of working nodes, with preprocessed images of different image sizes The image pair filter window is 21×21 to carry out SIFT feature matching comparison experiment, run SIFT feature matching CPU system, single GPU system and multi-GPUs system respectively, and record the processing time, see Table 1, with 489×561 image frame image pair The comparison experiment of SIFT feature matching with different filter window sizes is carried out, and the CPU system, single GPU system and multi-GPUs system of SIFT feature matching are run respectively, and the processing time is recorded, as shown in Table 2.
[0077] Table 1 Comparison of serial and parallel performance of SIFT feature matching in di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com