A five-degree-of-freedom robotic arm
A technology of mechanical arm and degree of freedom, applied in the field of mechanical arm, can solve the problems of complex mechanical arm mechanism, poor motion stability, low transmission efficiency, etc., and achieve the effect of compact mechanical structure, stable motion, and light suspension weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] Further illustrate the present invention below in conjunction with accompanying drawing.
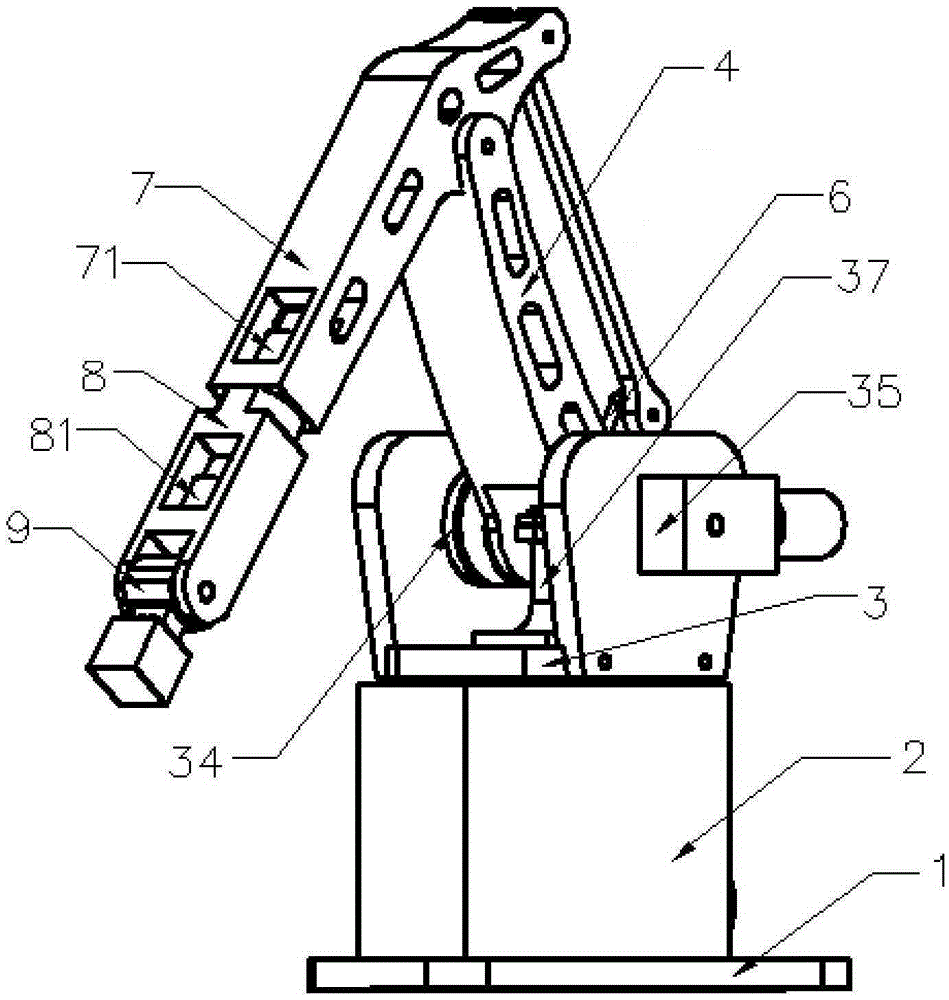
[0032] The five-degree-of-freedom mechanical arm includes a base 2, a base 3, a rear arm 4, a forearm 7, a wrist joint 8, and a palm 9. The base 2 is arranged on the bottom plate 1, and the base 3 is rotatably arranged on the base 2. Arm 4 is hinged on the base 3, one end of the forearm joint 6 and one end of the rear arm 4 are hinged on the same pivot on the base 3, the other end of the rear arm 4 is hinged with the forearm 7, the other end of the forearm joint 6 is hinged with the forearm One end of tendon 5 is hinged, and the other end of forearm tendon 5 is hinged with the rear end of forearm 7. The rear arm 4, forearm 7, forearm tendon 5, and forearm joint 6 form a parallelogram mechanism; the rear end of wrist joint 8 is rotatable Connected to the front end of the forearm 7, the palm 9 is rotatably mounted on the front end of the wrist joint 8;
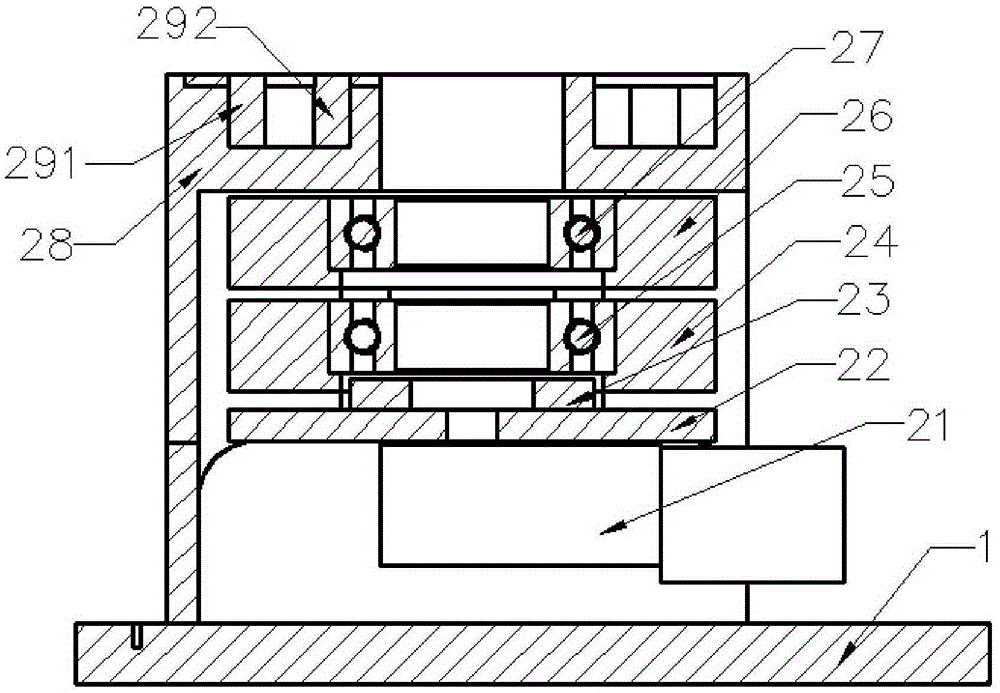
[0033] The base 2 is equipp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com