


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Thumb near-knuckle force feedback detection driving device
A technology of feedback detection and driving device, applied in the field of data gloves, can solve the problems of expensive force feedback data gloves, difficult maintenance, and complex systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
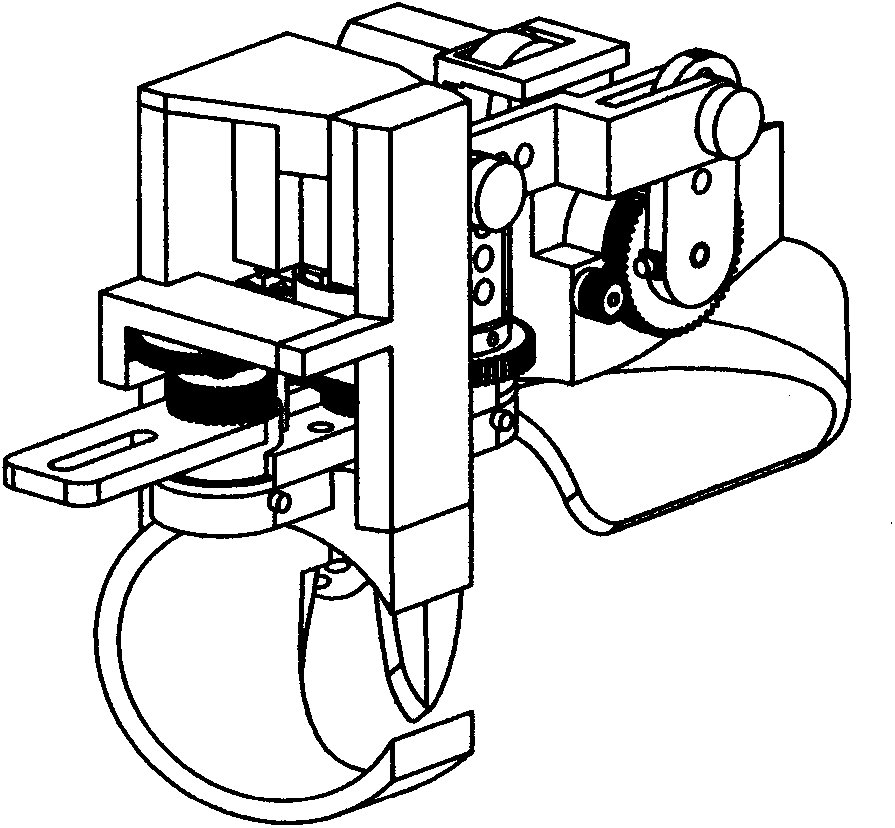
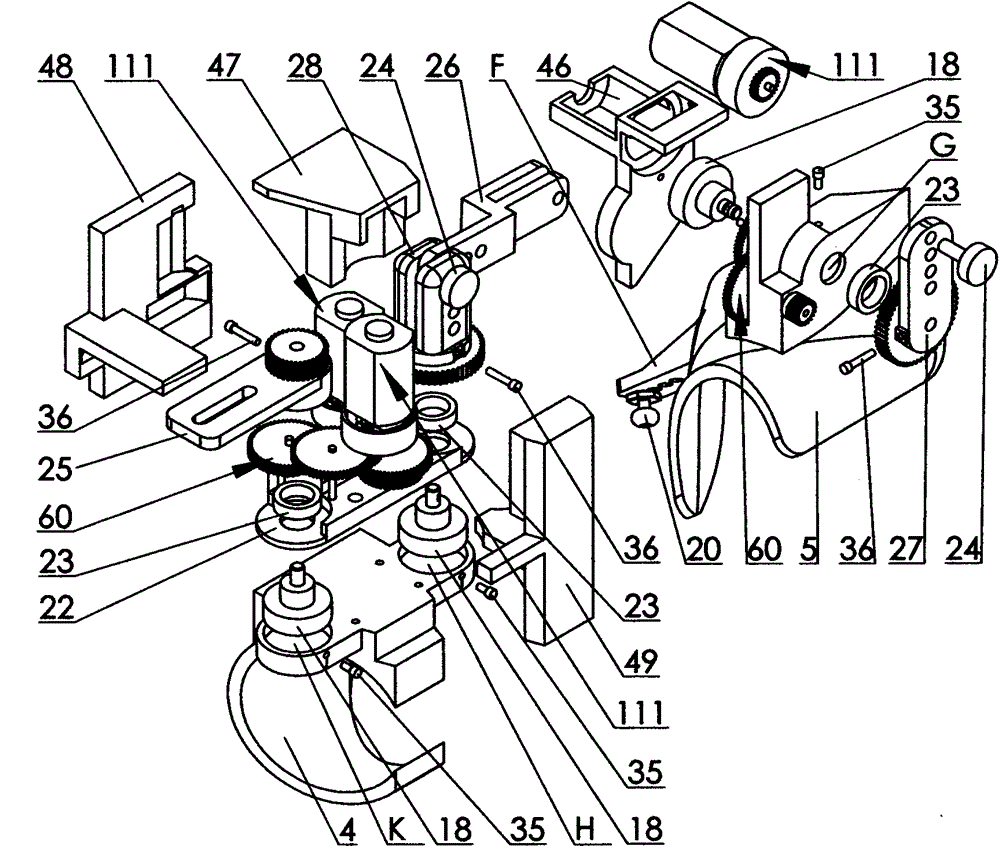
[0013] Specific implementation mode one: image 3 As shown, the thumb proximal knuckle force feedback detection driving device includes a driving part 111, and the driving part 111 includes a micro motor 40 and a clutch, and the clutch is pulled by a clutch friction plate 41, a friction plate slide bar 42, and a return The spring 43 and the clutch cover 44 are composed of the friction disc slide bar 42 and the shaft of the micro motor 40, and the two clutch friction plates 41 are inserted into the two ends of the friction disc slide bar 42 respectively. Position extension spring 43, clutch cover 44 is inserted into the axle of micromotor 40, is sliding contact between the axle of clutch cover 44 and micromotor 40, and clutch cover 44 is provided with transmission gear. Action implementation process: when the rotation speed of the micro motor 40 is higher than a certain value, the two clutch friction plates 41 overcome the pulling force of the return spring 43 and slide respect...
specific Embodiment approach 2
[0014] Specific implementation mode two: as figure 1 , figure 2 with image 3 As shown, the thumb proximal knuckle base 4 is fixed on the thumb proximal knuckle part of the human hand, the thumb proximal knuckle base 4 half surrounds the thumb proximal knuckle, and the cross section surrounding the junction is "C" shape, with an opening Facing the front side of the palm, there are two hole seats H and K at the position of the base on the outer side of the proximal knuckle of the thumb, and the positions of the two hole seats correspond to the metacarpophalangeal joint (MP) and interphalangeal joint of the thumb respectively (DIP). Thumb proximal knuckle base 4 and thumb metacarpophalangeal base 5 are hinged by rocking arm 28, connecting rod 26, rocking arm 27, and the bottom of said rocking arm 28 (embedded bearing 23) and the shaft of angle sensor 18 are passed through screw 36, the angle sensor 18 is fixed in the hole seat H of the thumb proximal knuckle base 4 by the ge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com