Human hand upper arm abduction and adduction movement detection device
A motion detection and detection device technology, applied in diagnostic recording/measurement, instruments that can be operated by disabled people, medical science, etc., can solve the problems of augmented virtual reality or teleoperation presence, bloated structure, complex system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
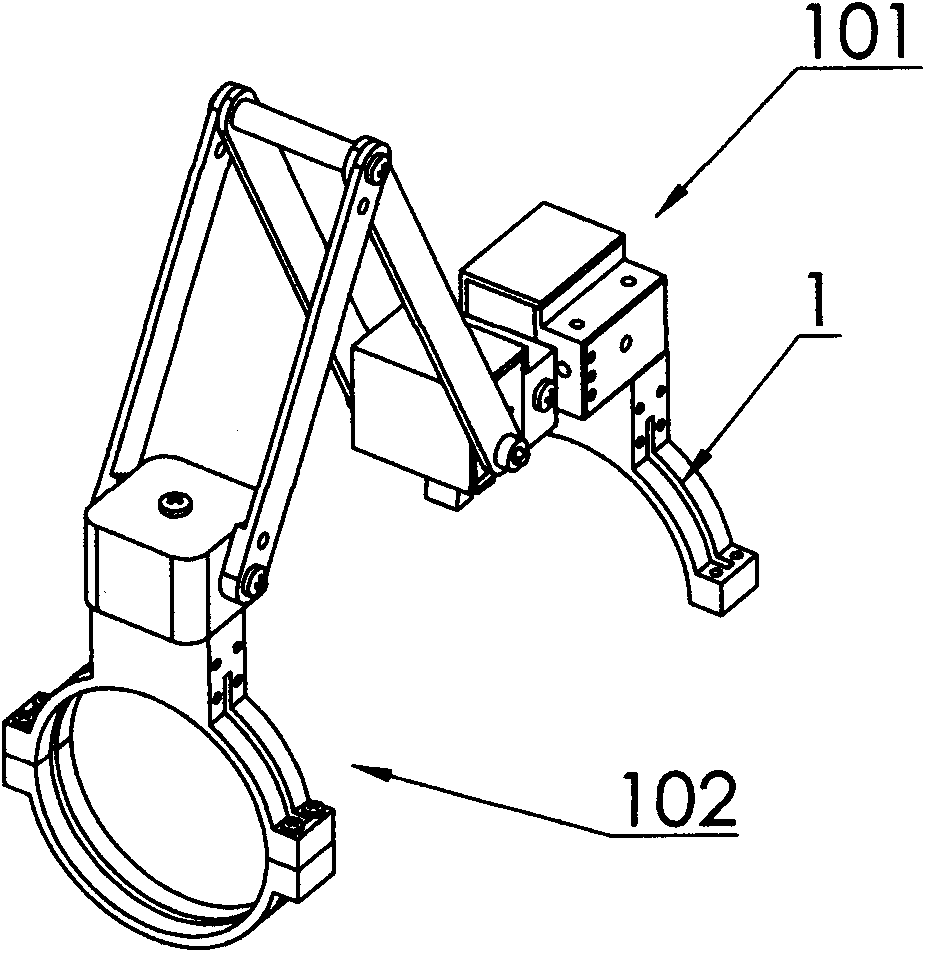
[0013] Specific implementation mode one: as figure 1 As shown, the human upper arm abduction and adduction motion detection device includes an upper arm fixing device 102 , connecting rods 2 - 1 , 2 - 2 , a shoulder detection device 101 , and a shoulder base 1 . The upper arm fixing device 102 is fixed on the operator's upper arm, the shoulder detection device 101 is composed of two sets of joint detection components 105-1 and 105-2, and the shoulder detection device 101 is fixed on the shoulder base 1 , the shoulder base 1 is fixed on the operator's shoulder, the shoulder detection device 101 and the upper arm fixing device 102 are hinged through two-stage connecting rods 2-1, 2-2, and the abduction and adduction motion detection device of the upper arm of the human hand is connected to the operator's arm. The detection of shoulder joint motion is carried out by joint detection parts 105-1 and 105-2.
specific Embodiment approach 2
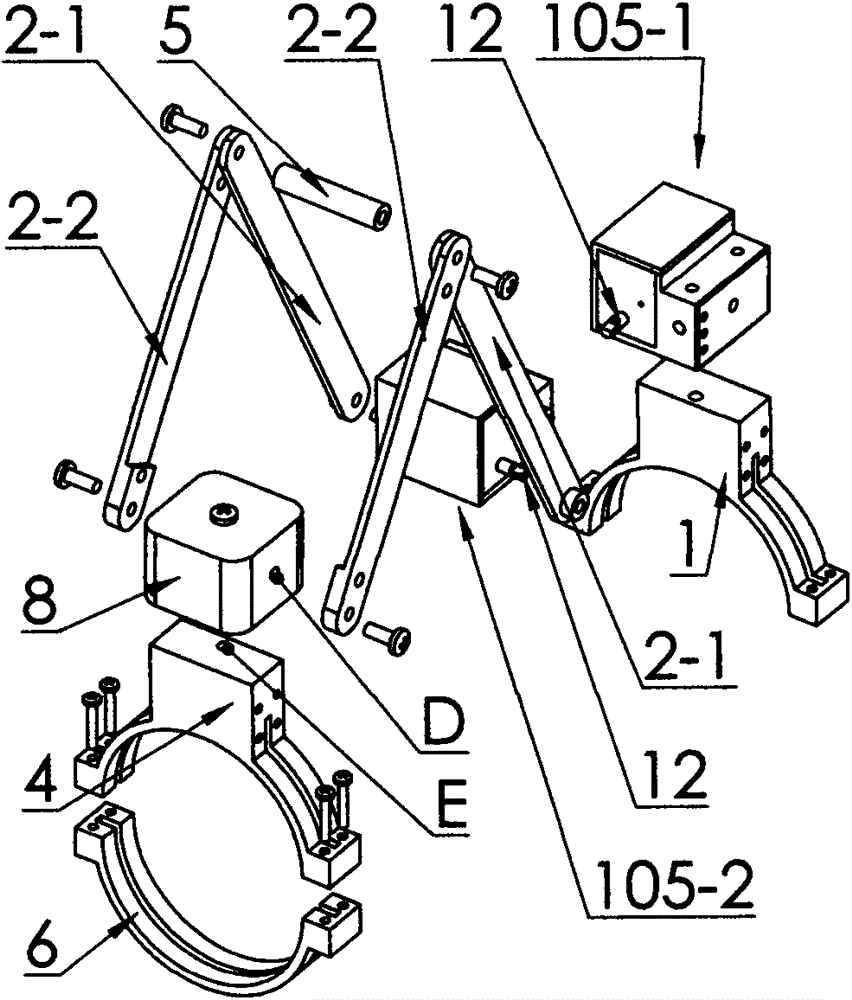
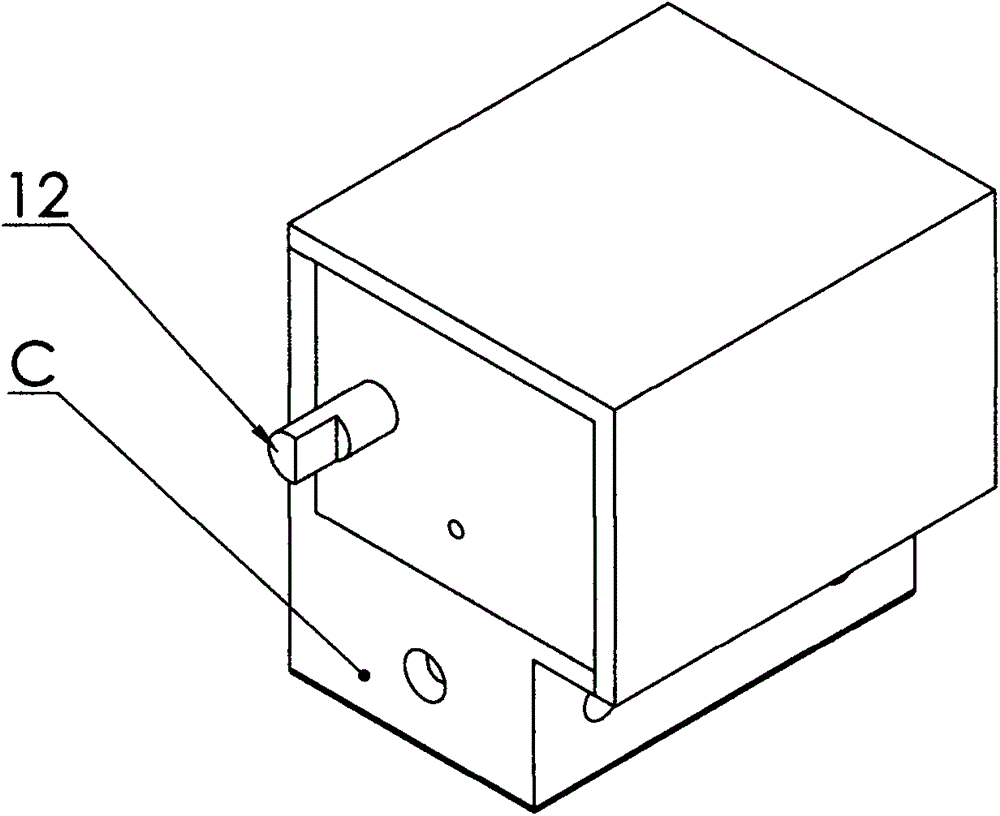
[0014] Specific implementation mode two: as figure 1 , figure 2 , image 3 and Figure 4 As shown, the joint detection components 105 - 1 and 105 - 2 include housings 9 , 10 , 11 , a transmission shaft 12 and an angle sensor 13 . The transmission shaft 12 is linked with the angle sensor 13 through gear meshing. Action implementation process: when the transmission shaft 12 rotates, the transmission shaft 12 drives the angle sensor 13 to rotate through the gear.
specific Embodiment approach 3
[0015] Specific implementation mode three: as figure 1 , figure 2 , image 3 and Figure 4 As shown, the upper arm fixing device 102 includes an upper arm fixing ring upper part 4 , an upper arm fixing ring lower part 6 , and a rotating connector 8 . Both ends of the upper arm fixing ring upper part 4 and the upper arm fixing ring lower part 6 are fixedly connected by screws to form a complete ring. The rotating connector 8 and the upper arm fixing ring upper part 4 are hinged to the hole E of the upper arm fixing ring upper part 4 through screws, and the axis of the hinged rotation connecting part 8 and the upper arm fixing ring upper part 4 is perpendicular to the circular ring of the upper arm fixing ring upper part 4 axis. The shoulder detection device 101 includes joint detection components 105-1, 105-2. The base of the joint detection component 105-1 is affixed to the shoulder base 1, the base of the joint detection component 105-2 is fixed to the transmission shaf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com