


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Cooperative operation device for micro-nano operation robot and its operation method for microinjection
A collaborative operation and microinjection technology, applied in enzymology/microbiology devices, biochemical cleaning devices, biochemical equipment and methods, etc., can solve the problems of poor flexibility, easy removal from the microscope field of view, injection, etc., and achieve low cost , easily automated effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
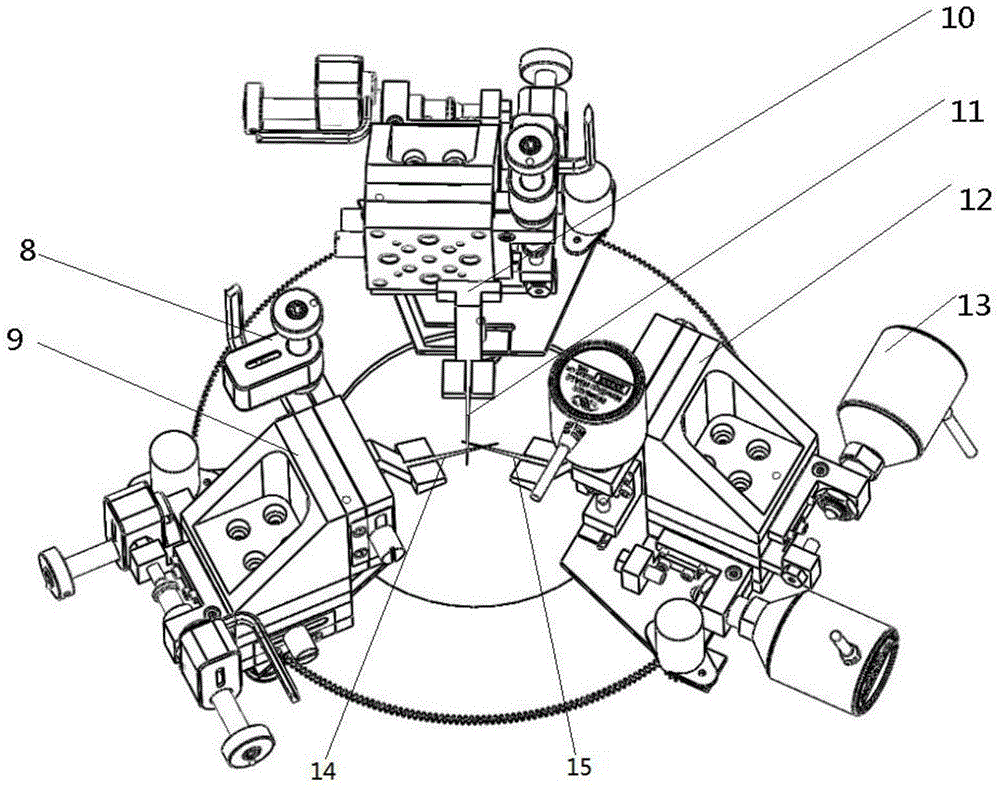
[0022] Embodiment 1, see attached figure 1 , a micro-nano operation robot cooperative operation device, which includes: a slow-speed high-precision micro-nano operation robot 9, a fast high-precision micro-nano operation robot 12 and a micro-manipulator 11; a slow-speed high-precision micro-nano operation robot 9, a fast high-precision micro-nano operation robot The bottoms of the nano-manipulator robot 12 and the micro-manipulator 11 are installed on the annular support track 1 through the mounting table 3;
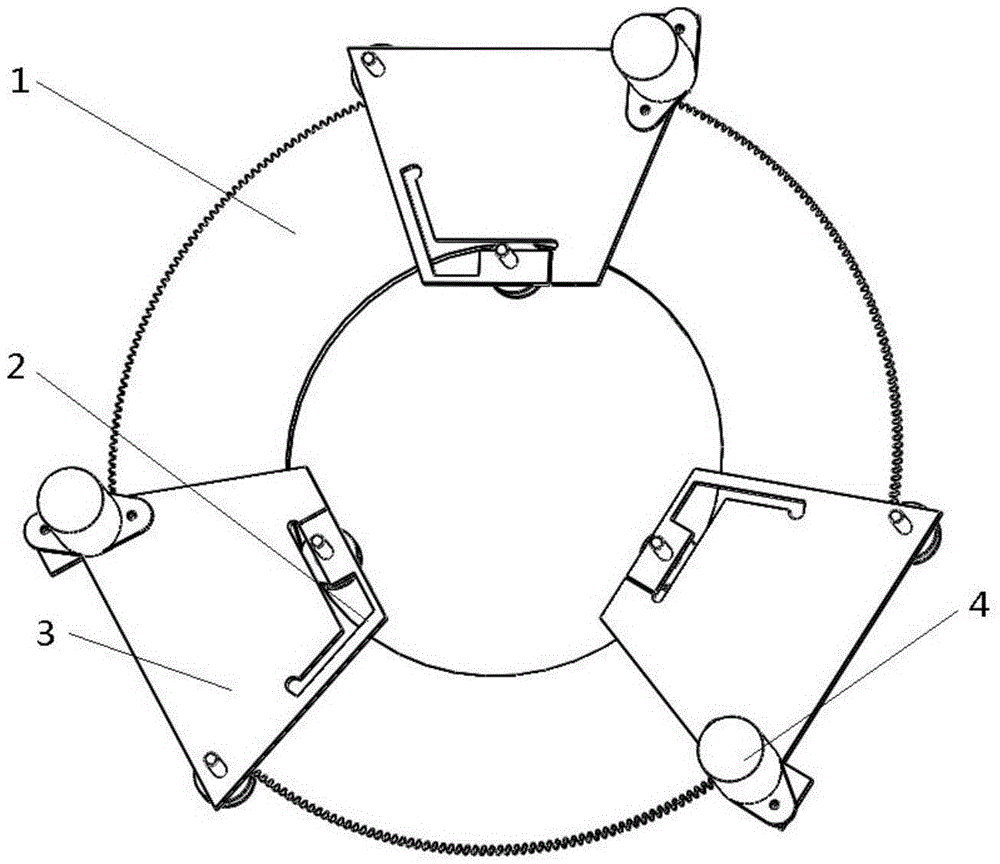
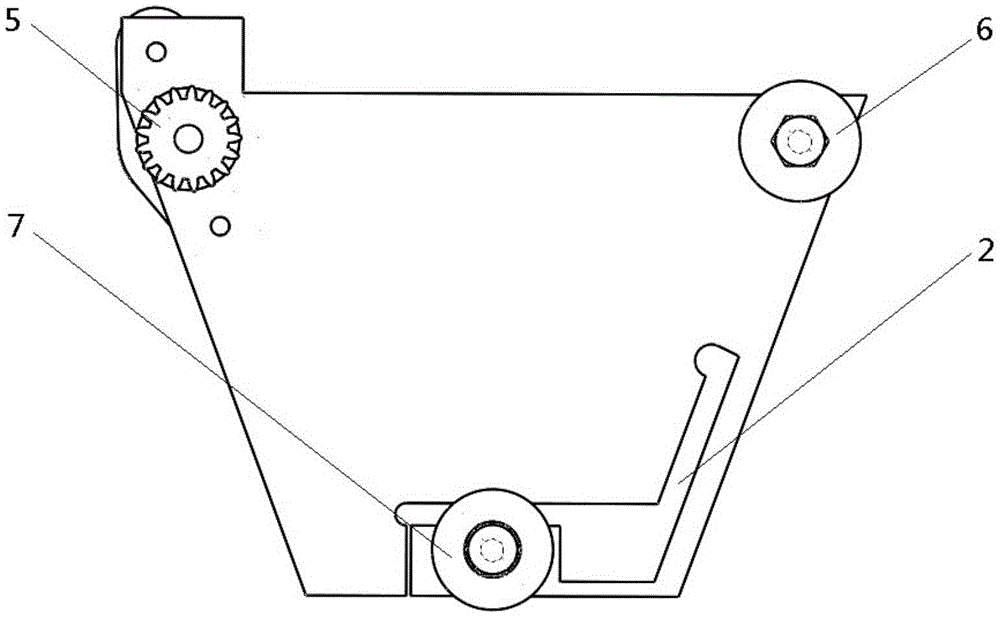
[0023] See attached figure 2 , 3 , the inner ring of the annular support track 1 is a smooth surface, and the outer ring has a gear ring; one end of the mounting table 3 is provided with an elastic clamping mechanism 2, and the elastic clamping mechanism 2 is provided with an inner smooth guide wheel 7; The mounting table 3 on the opposite side of the mechanism 2 is provided with a driving motor 4, an external driving gear 5 and an external driven gear 6, and the exte...
Embodiment 2
[0027] Embodiment 2, the micro-nano operation robot cooperative operation device is used for the operation method of microinjection, it is based on the micro-nano operation robot cooperative operation device described in embodiment 1, and includes the following steps:
[0028] A. Adjust the center of the field of view of the microscope to coincide with the center of the annular support track 1, and adjust the slow-speed high-precision micro-nano manipulation robot 9 and the fast high-precision micro-nano manipulation robot 12 so that the micromanipulators 11 on them all point to the center of the field of view;
[0029] B. Operate the fast and high-precision micro-nano manipulating robot 12 used to fix the cells, fix the cell with the suction pipe on it to fix the probe 15 and move it to the center of the field of view, and then release the cell to control the fast and high-precision micro-nano manipulating robot 12 Lift the pipette fixed probe 15 to 50 μm in the vertical direc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com