Four-wheel indoor mobile robot
A mobile robot and wheeled technology, applied in the field of robotics, can solve the problems of slow commutation speed, easy damage, and large noise of DC brushed motors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
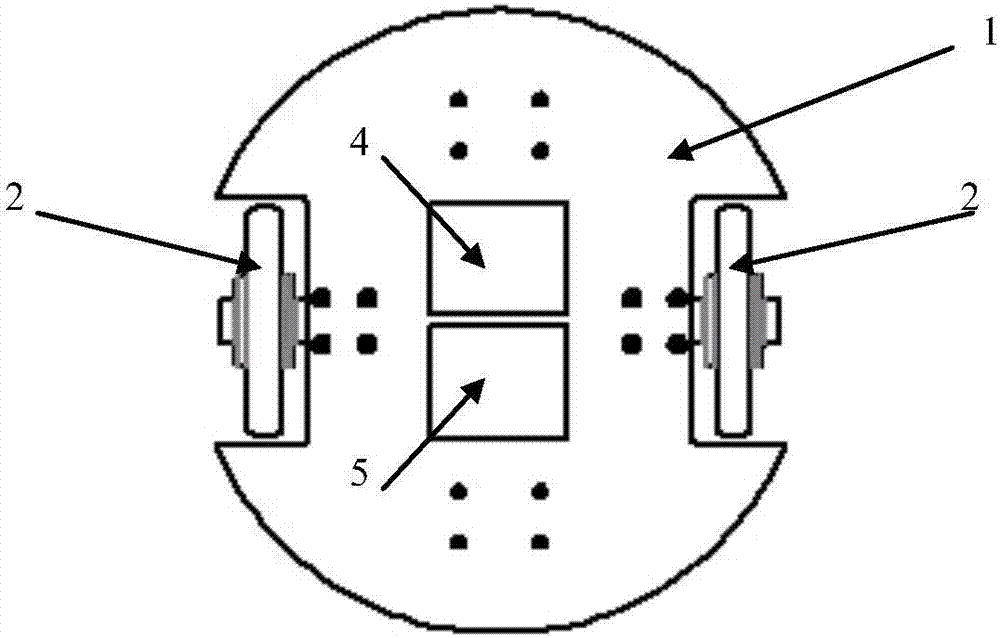
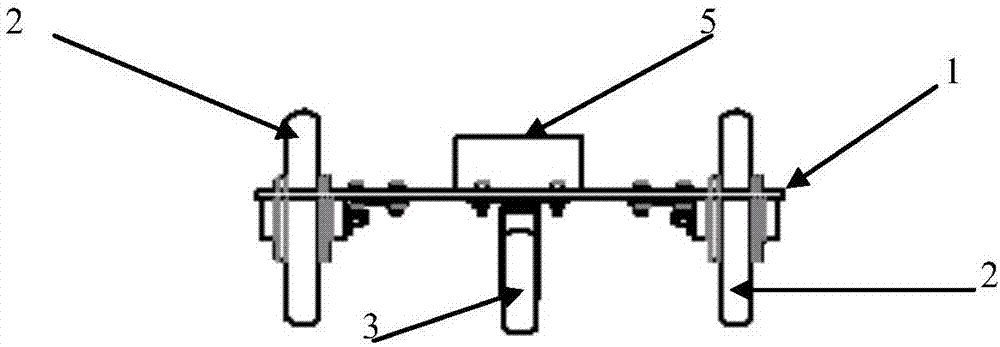
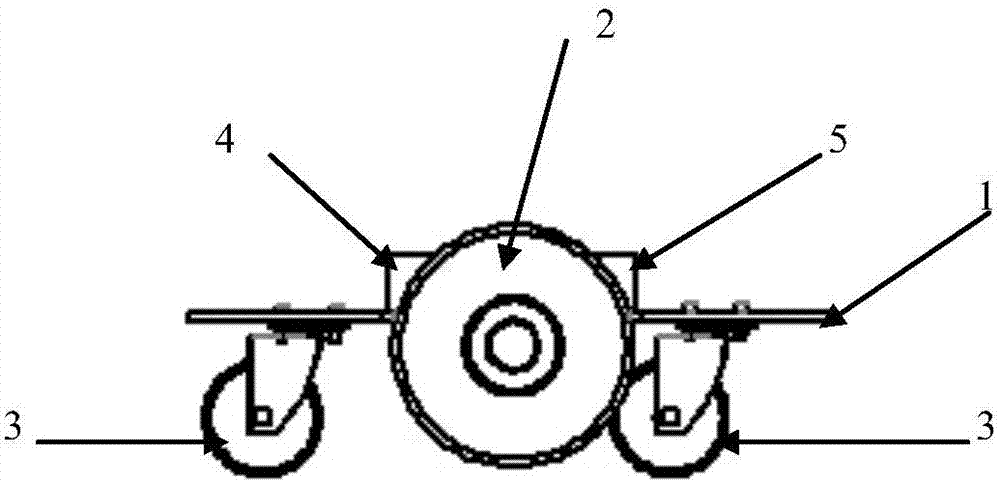
[0061] according to figure 1 , figure 2 with image 3 The shown embodiment installs the four-wheeled indoor mobile robot of this embodiment, the installation centers of its four wheels are located on the same circle on the horizontal plane, and the two drive wheels 2 are all independent 8-inch ones with Hall effect sensors The hub-type DC brushless motor is used as the driving wheel of the driving motor. The Hall effect sensor can detect the position information of the rotor in the motor and output the Hall position signal. The two universal wheels 3 are 3-inch polyurethane universal wheels , the controller 4 is a controller that uses a full-bridge PWMDC / DC converter operating in a bipolar mode to drive a brushless DC motor, and the lithium battery 5 is a 24V lithium battery. The controller 4 includes a hardware part and a software part, wherein the hardware part is composed of a signal acquisition / processing circuit and a drive circuit, and the software part includes a sig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com