LMIs state feedback system control method based on uncertain model
A technology of state feedback and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem that asymptotic stability and robustness of closed-loop system cannot be guaranteed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with specific examples.
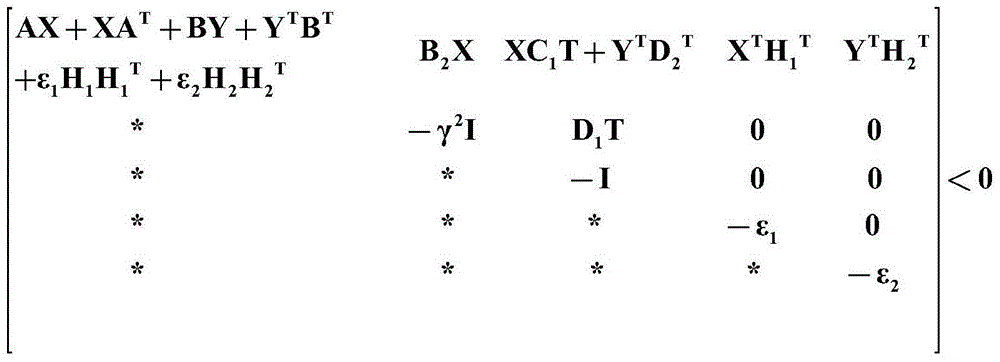
[0044] The LMIs state feedback system control method based on the uncertain model described in this embodiment aims at the uncertainty of the control object, and designs the state feedback controller with the help of the linear matrix inequality group LMIs, so that the closed-loop system is asymptotically stable, and then solves the problem of Due to the existence of uncertainty, the asymptotic stability and robustness of the closed-loop system cannot be guaranteed. Firstly, the controlled object model including uncertain parameters is established, and then the system state feedback controller is introduced, and the nonlinear system control law is designed on the basis of satisfying the Lyapunov theorem through the construction function of the closed-loop system. This control method considers the control problems faced by the system with a certain degree of uncertainty, includ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com