Method for positioning carrier roller shaft and carrier roller drum in grabbing fingers
A positioning method and a technology of supporting rollers, which are applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of inconcentric positioning of manipulators and fixtures, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
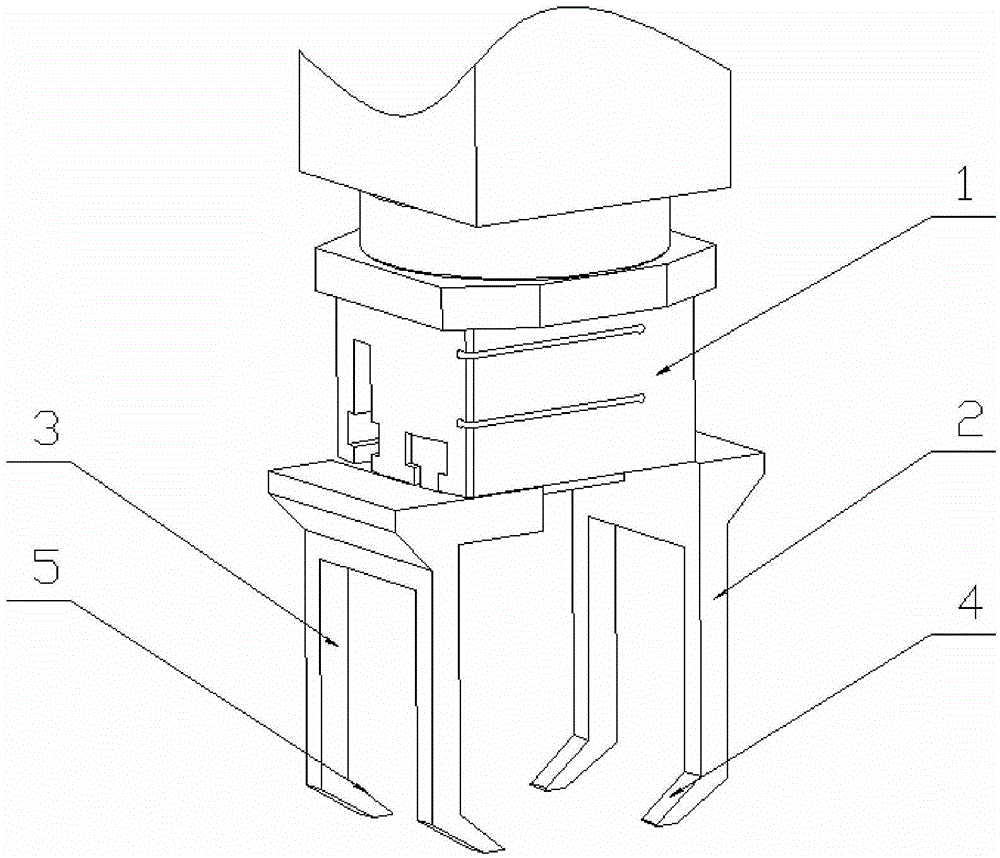
[0006] attached figure 1 It is a specific case of the implementation of this program, and it is a specific structural layout diagram of the fingers of the manipulator. 1 is the clamping actuator, 2 and 3 are the grasping fingers of the left and right manipulators respectively, and the grasping fingers are left and right symmetrical in layout. 4, 5 are two slopes for positioning on the grasping finger 2 and the grasping finger 3 respectively. According to the length of the part, the width of the inclined plane 4 and 5 in the axial direction of the grasped part can be designed, and it can also be divided into several sections in the axial direction of the grasped part. In this example, the finger positioning surface in the axial direction is divided into 2 sections, divided into After the section, it can better constrain the inclination of the part along the axial direction. The feature of this kind of grabbing finger is that it adopts 2 sets of fingers moving towards each othe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com