Distance measuring device and robot system
A distance measuring device and distance technology, which is applied in the field of distance measuring devices and robot systems, can solve problems such as lack of distance, and achieve the effect of accurate distance measuring ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
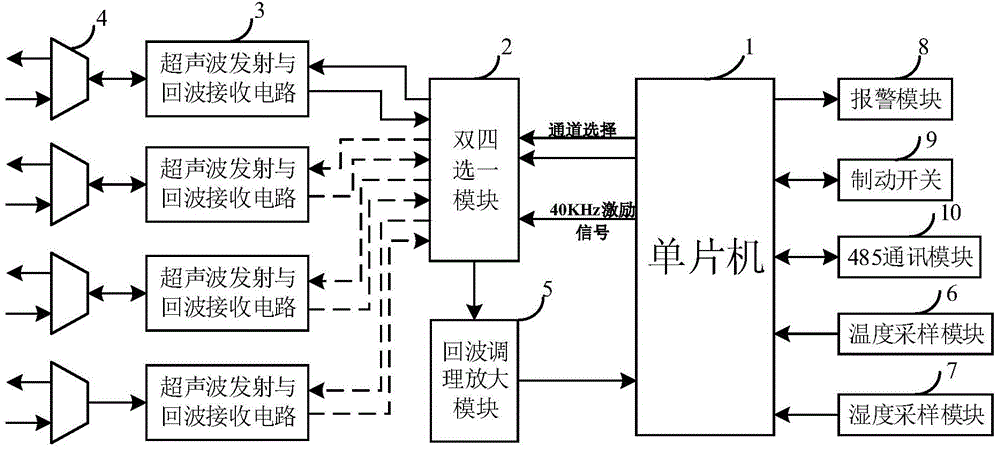
[0026] refer to figure 1 As shown, the distance measuring device in this embodiment includes an ultrasonic transceiver module 3, a temperature sampling module 6, a humidity sampling module 7 and a processor 1. The ultrasonic transceiver module is used to transmit ultrasonic waves in a preset direction and receive echoes. The temperature sampling module 6 is used to measure the ambient temperature, and the humidity sampling module 7 is used to measure the ambient humidity. It should be understood that figure 1 The alarm module 8, the brake switch 9 and the 485 communication module 10 are not located in the distance measuring device. The single-chip microcomputer 1 includes a ranging module and a correction module, and the correction module is used to correct the standard sound velocity to the actual sound velocity according to the preset correction formula, the ambient temperature and the ambient humidity, and the distance measuring module is used to obtain the sound velocity ...
Embodiment 2
[0034] refer to figure 1 As shown, the robot system of this embodiment includes the ranging device of Embodiment 1, an alarm module 8 , a brake switch 9 and a 485 communication module 10 .
[0035] The alarm module 8 is used for receiving the obstacle distance measured by the ranging module, and sending an alarm when the received obstacle distance is smaller than a preset first distance threshold. The brake switch 9 is used to send an alarm when the obstacle distance is smaller than a preset second distance threshold, and the second distance threshold is smaller than the first distance threshold. The 485 communication module 10 is used to send the obstacle distance measured by the ranging module to a remote terminal in real time.
[0036]When the distance between the robot system and the obstacle is close to the safe value, the single chip computer outputs the level control alarm module 8 for early warning. When the safety value is exceeded, the single-chip microcomputer wil...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com