Praxeology-based position tracking method
A behavioral and human technology, applied in the field of position tracking based on human behavior, can solve the problems of high algorithm complexity, high hardware requirements, large number of samples, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0021] Specific implementation mode one: the position tracking method based on human behavior in this embodiment, the human behavior is mainly reflected in the characteristics that people do not go backwards when walking, and the position tracking method is realized through the following steps:
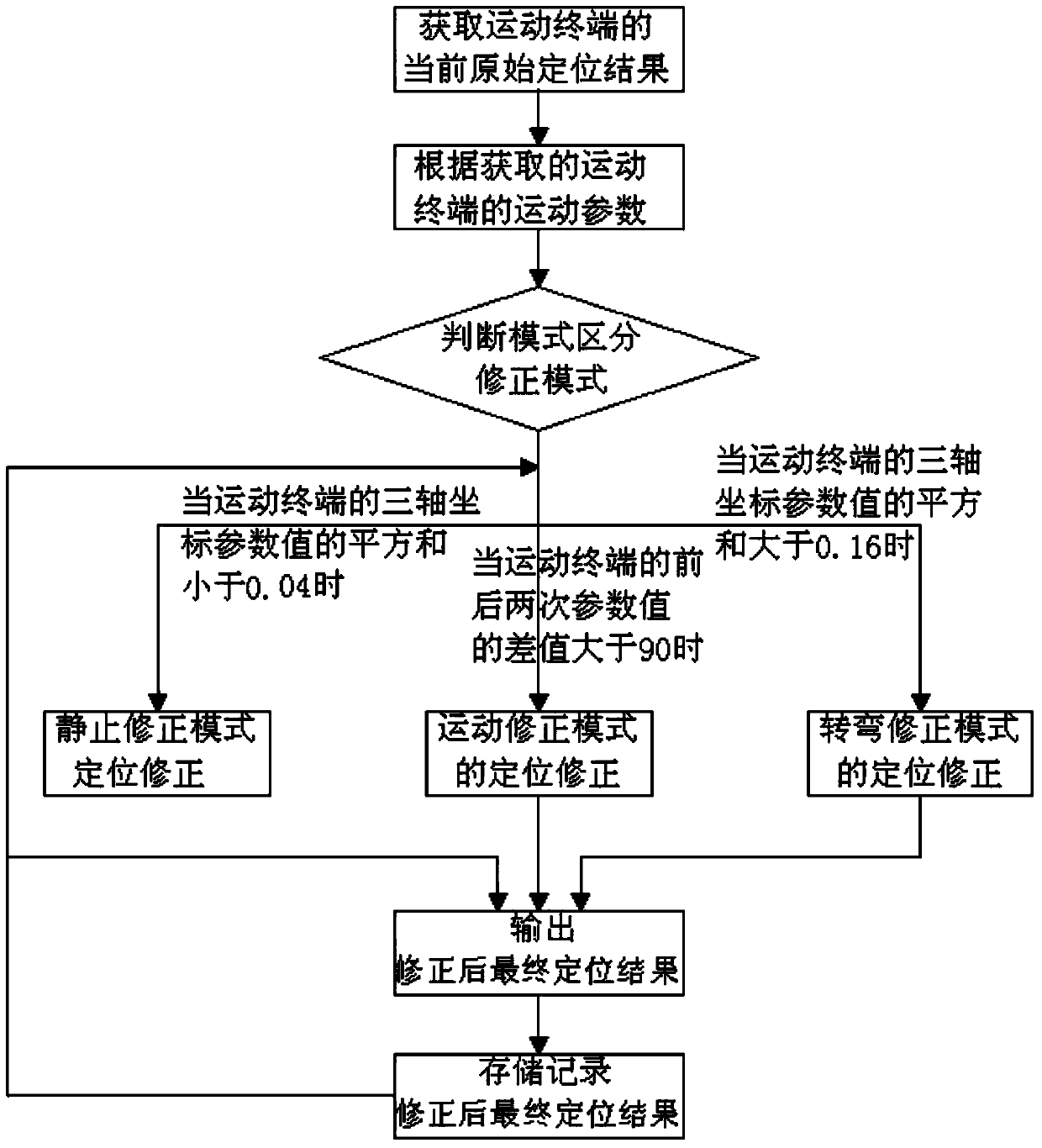
[0022] Step 1. Obtain the current original uncorrected positioning result of the mobile terminal by the positioning algorithm according to the positioning interval time T shorter than the sensor acquisition period;
[0023] Step 2, acquiring motion parameters of the motion terminal through the acceleration sensor and the direction sensor;
[0024] Step 3. Judging and distinguishing the motion parameters obtained in step 2 to determine the three correction modes to be performed by the motion terminal:
[0025] When the sum of the squares of the three-axis coordinate parameter values of the mobile terminal obtained by the acceleration sensor is less than 0.04, it is judged that the cu...
specific Embodiment approach 2
[0031] Different from Embodiment 1, in the position tracking method based on human behavior of this embodiment, the specific positioning correction process of the static correction mode described in step 3 is: establish a two-dimensional coordinate system in the test field area, and its coordinate axes are respectively for the X-axis and Y-axis,
[0032] When the mobile terminal is in a static state, whether it is static or not is judged by the acceleration sensor parameters, its current original uncorrected positioning result should be basically consistent with the final positioning result at the previous moment. In order to make up for the possible errors in the final positioning result at the previous moment, the The current original uncorrected positioning result is corrected in the static correction mode with a margin; let the final positioning result at the previous moment be X n-1 , Y n-1 , let the current original uncorrected positioning result be x, y, through formul...
specific Embodiment approach 3
[0034] The difference from the specific embodiment 1 or 2 is that in the position tracking method based on human behavior in this embodiment, the specific correction process of the motion correction mode described in step 3 is: in the two-dimensional coordinate system established in the test field area, its coordinates The axes are X-axis and Y-axis respectively,
[0035] When the mobile terminal is in motion, its current original uncorrected positioning result should be in front of the movement direction of the final positioning result at the previous moment. Based on the average moving speed factor of human behavior, the final positioning result at the previous moment is X n-1 , Y n-1 , let the current original uncorrected positioning result be x, y, when the mobile terminal moves along the X-axis or Y-axis direction, the formula 2 is used:
[0036] X n = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com