Sound source locating method based on improved PHAT weighting time delay estimation and implementation system thereof
A technology for time delay estimation and sound source localization, which is used in positioning, radio wave measurement systems, instruments, etc., and can solve problems such as inability to accurately identify multiple sound sources and inability to distinguish directional noise.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0070] A sound source localization method based on improved PHAT weighted delay estimation, specifically comprising the following steps:
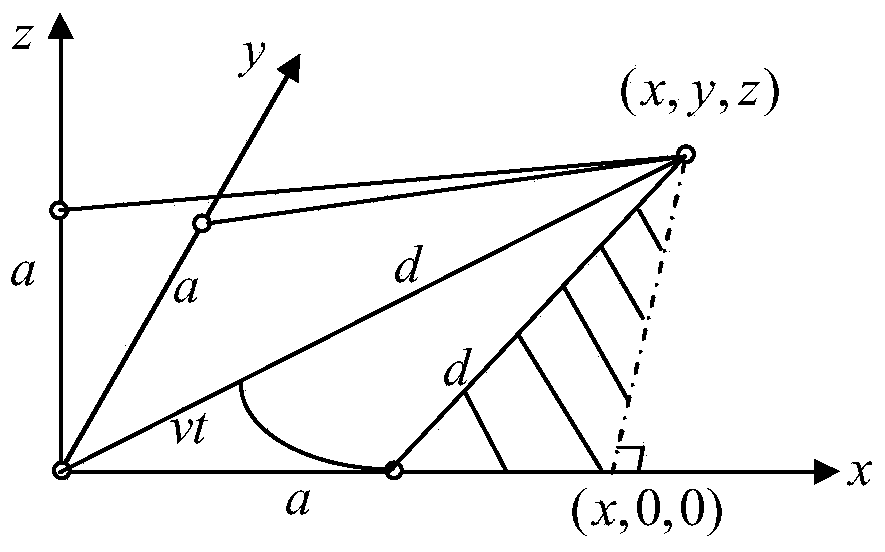
[0071] (1) Select (0,0,0), (a,0,0), (0,a,0), (0,0,a) four positions to place the microphone in the three-dimensional Cartesian coordinate system, and get the microphone array, the a is a fixed parameter, and the a represents three microphones located at the coordinates (a,0,0), (0,a,0), and (0,0,a) respectively to the origin coordinates (0 ,0,0) the distance of the microphone at the position;
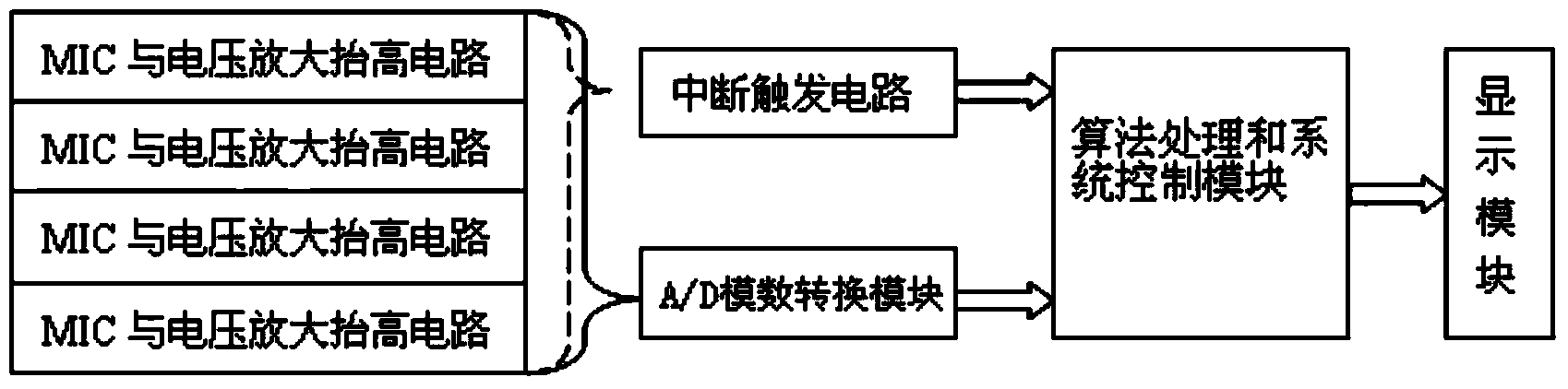
[0072] (2) The microphone array in step (1) collects 4-way sound signals, and amplifies the sound signals, and realizes the DC pad processing for the amplified sound signals, and outputs an analog signal;
[0073] The described DC boosting process is realized by utilizing the existing MIC and voltage amplification boosting circuit, and the MIC and voltage amplification boosting circuit includes 4 microphones and two-stage operational amplifiers to r...
Embodiment 2
[0083] According to a sound source localization method based on improved PHAT weighted time delay estimation described in Embodiment 1, the difference is that the time delay estimation algorithm is performed using the improved PHAT weighted generalized cross-correlation function method described in step (5). Processing, specifically including the following steps:
[0084] a. The 4 digital signals described in step (4) are respectively set to x 1 (n), x 2 (n), x 3 (n), x 4 (n), the 4 digital signals described in step (4) are sequentially subjected to windowing filter processing and Fourier transform to obtain frequency domain signal X successively 1 (k), X 2 (k), X 3 (k), X 4 (k), said n and k are both integers, representing the serial numbers of points in said digital signal;
[0085] b. Using the improved PHAT weighted generalized cross-correlation function method to calculate X in the 4 channels of frequency domain signals obtained in step a through formula Ⅰ, formula...
Embodiment 3
[0120] According to the sound source localization method based on the improved PHAT weighted delay estimation described in Embodiment 2, the difference is that the value of N is 0.8.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com