Transformer substation patrol robot positioning and navigation system
A technology of inspection robots, positioning and navigation, applied in navigation, surveying and mapping, road network navigators, etc., can solve problems such as strong manual dependence, and achieve the effects of good promotion, rich map information, and low hardware complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
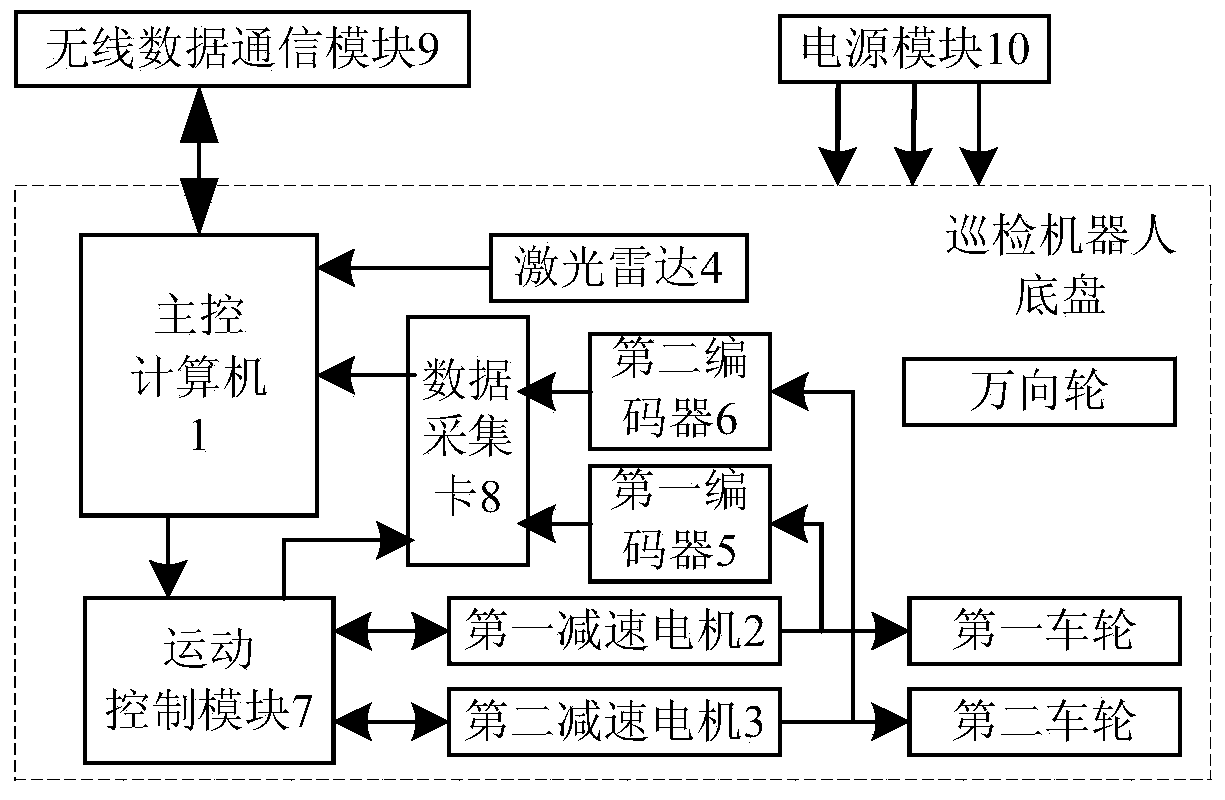
[0023] combine figure 1, a substation inspection robot positioning and navigation system, including a main control computer 1, a first gear motor 2, a second gear motor 3, a laser radar 4, a first encoder 5, a second encoder 6, a motion control module 7, The data acquisition card 8, the wireless data communication module 9 and the power supply module 10, the output end of the laser radar 4 is connected with the main control computer 1, and the surrounding environment information is sent to the main control computer 1, and the input of the main control computer 1 and the motion control module 7 The output end of the motion control module 7 is connected with the input ends of the first geared motor 2 and the second geared motor 3 at the same time to drive the first geared motor 2 and the second geared motor 3 to rotate. The first geared motor 2 and the second geared motor The output end of geared motor 3 is connected with the input end of first encoder 5, the second encoder 6 re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com