c-type robot leg mechanism
A leg mechanism and robot technology, applied in the mechanical field, can solve serious problems such as robot slipping and sinking, slipping and sinking, etc., and achieve the effect of large friction coefficient, ensuring speed and stability, and ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
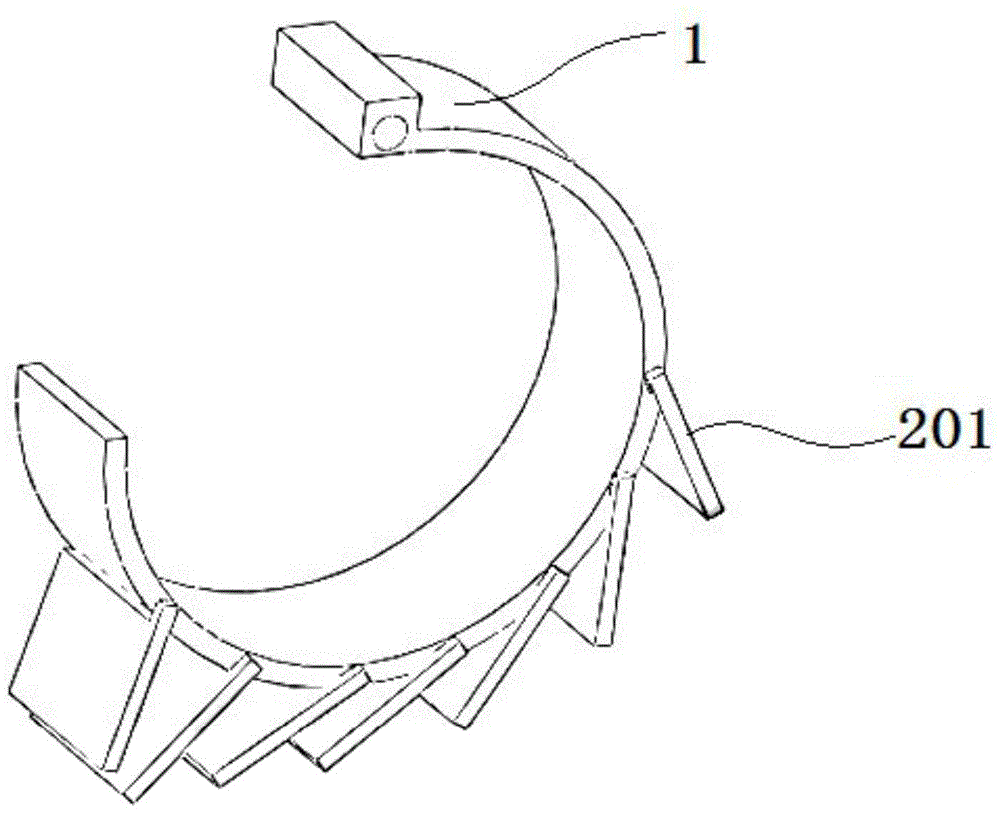
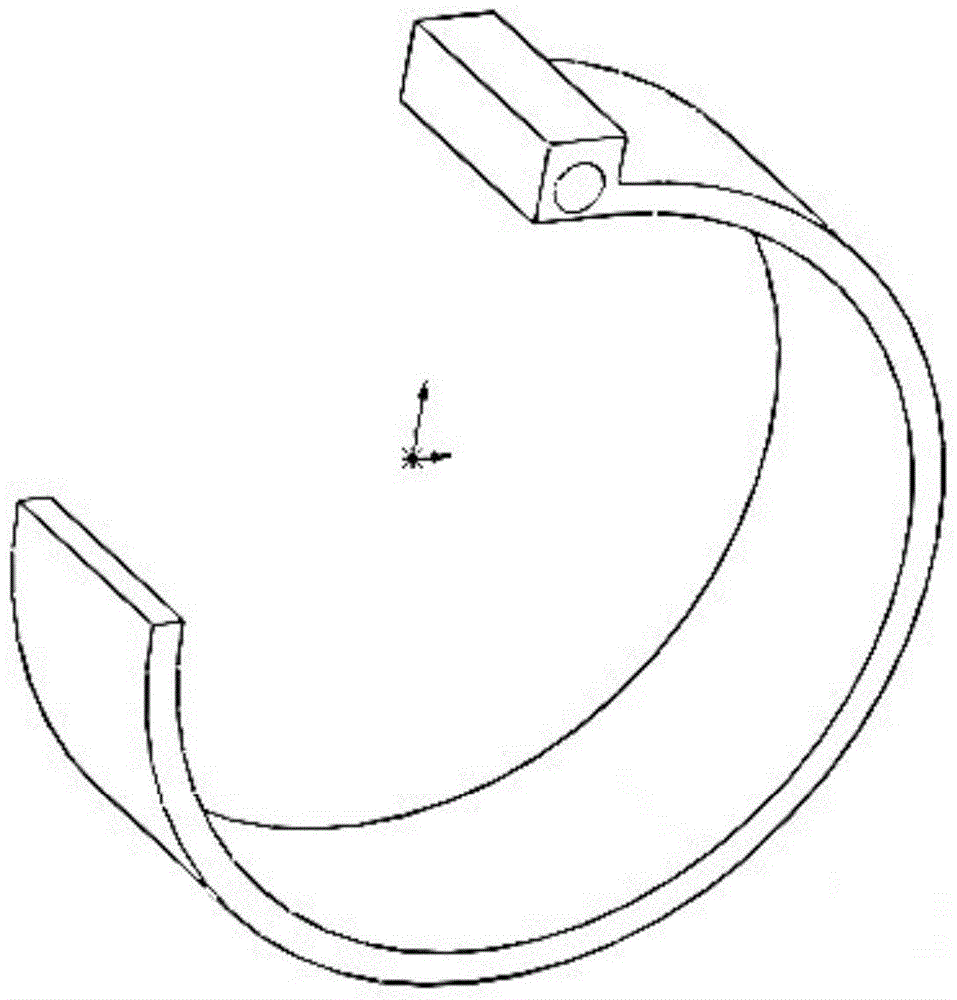
[0045] This embodiment provides a C-shaped robot leg mechanism, including a C-shaped leg frame and an external accessory structure, and the external accessory structure is installed in the walking area of the C-shaped leg frame;
[0046] The external accessory structure includes a plurality of foot structures arranged at certain intervals in the walking area of the C-shaped leg frame, wherein each piece of foot structure is connected with the C-shaped leg frame through a connecting structure.
[0047] Further, the C-shaped leg frame is made of plastic material, and the walking area of the C-shaped leg frame is provided with a plurality of connecting through holes matching the position and specification of the connecting structure, and the connecting structure is fixed in the connecting through holes.
[0048] Further, the foot structure adopts a thin steel sheet structure, and the connection structure adopts a joint structure or a shaft-moving structure, and the joint str...
Embodiment 2
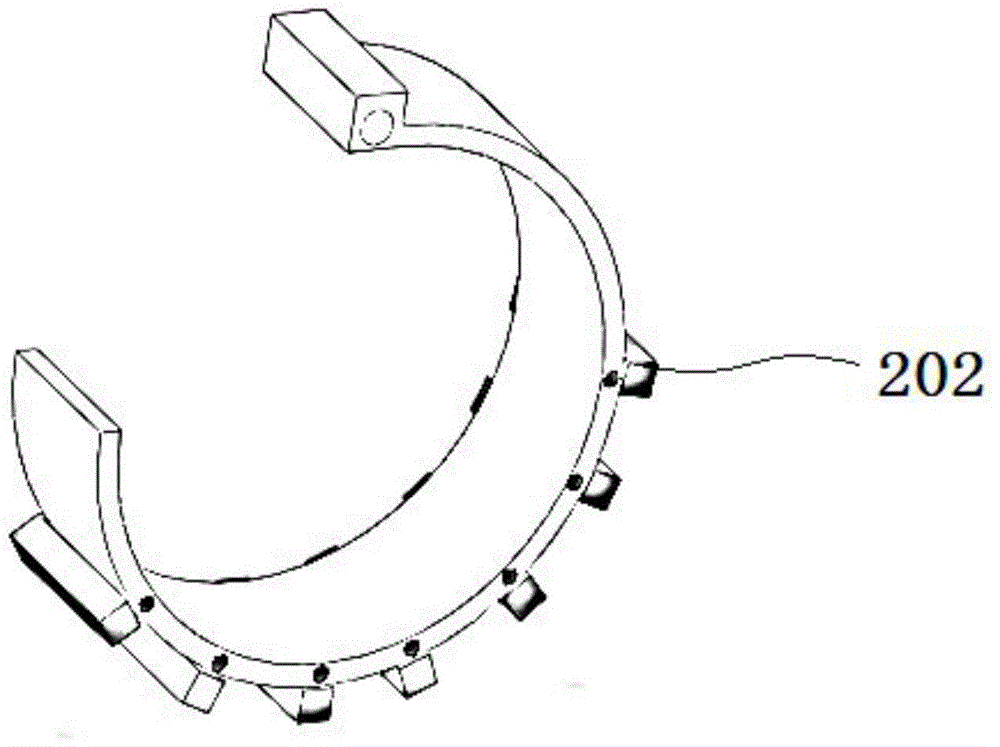
[0066] This embodiment provides a C-shaped robot leg mechanism, including a C-shaped leg frame and an external accessory structure, and the external accessory structure is installed in the walking area of the C-shaped leg frame;
[0067] The external accessory structure includes a plurality of foot structures arranged at certain intervals in the walking area of the C-shaped leg frame, wherein each piece of foot structure is connected with the C-shaped leg frame through a connecting structure.
[0068] Further, the C-shaped leg frame is made of plastic material, and the walking area of the C-shaped leg frame is provided with a plurality of connecting through holes matching the position and specification of the connecting structure, and the connecting structure is fixed in the connecting through holes.
[0069] Further, the foot structure adopts a strip-shaped rubber structure, and the connection structure adopts a shaft structure, and the shaft structure is fixed to the co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com