A kind of output feedback control method of motor position servo system
A servo system and motor position technology, applied in the estimation/correction of motor parameters, observer control, etc., can solve the problems of measurement noise affecting the tracking performance of the system, the performance of the motor servo system, and the inability to install speed sensors. Effects of low-speed servo performance, improved high-frequency dynamics and measurement noise, and improved tracking performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
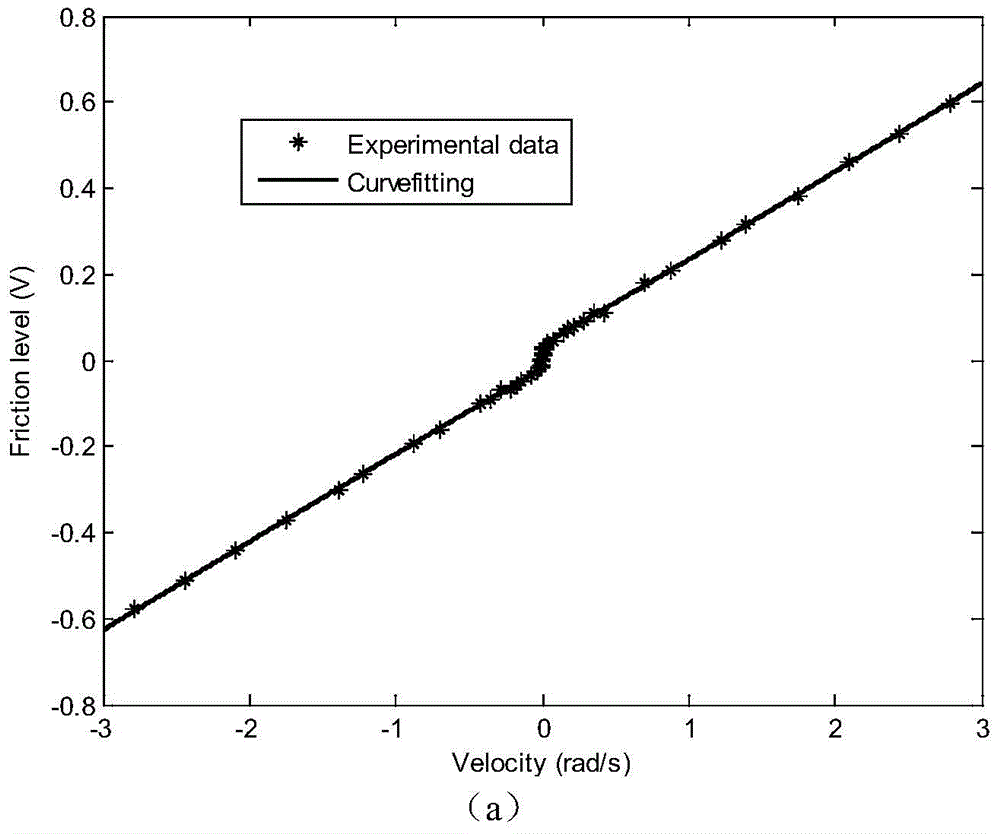
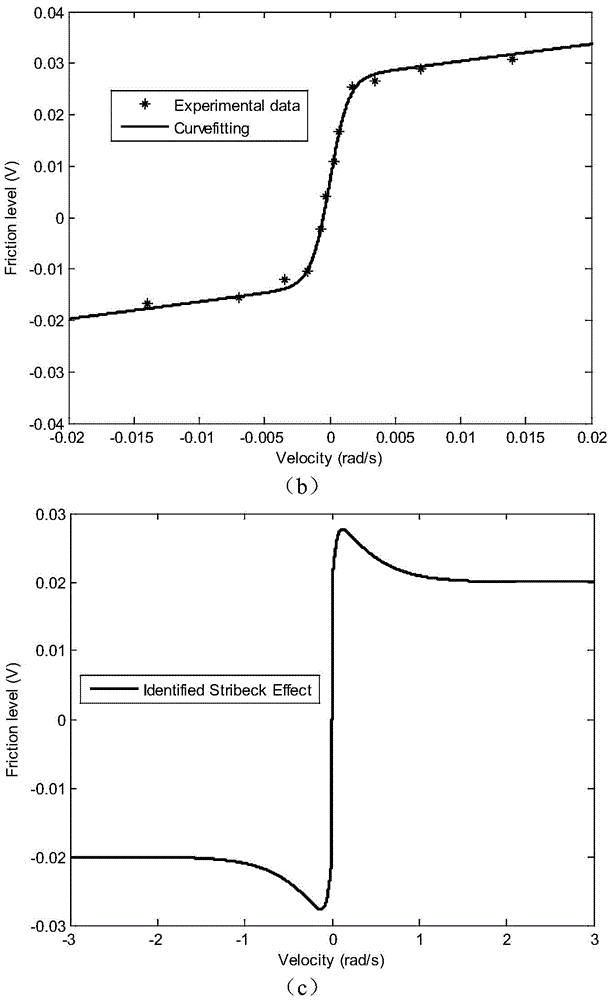
[0106] Motor position servo system parameters are inertial load parameters: m = 0.02kg; viscous friction coefficient B = 10N m s / °; torque amplification factor k i =6N / V; time-varying external disturbance f(t)=10sint; parameters in the continuous friction model: l 1 =0.1; l 2 =0.06; l 3 =700; l 4 =15; l 5 = 1.5.
[0107] The position command that the system expects to track is as follows Figure 4 The curves of the sine command shown, the command speed and acceleration changing with time are also given together.
[0108] Comparison of simulation results: nonlinear output feedback controller (OFRC) parameter selection: k 1 =0.3;k 2 = 800; ω 0 =6000; PID controller parameter selection: k P =1699;k I = 13097; k D =0.
[0109] The selection steps of the PID controller parameters are as follows: First, under the condition of ignoring the nonlinear dynamics of the motor servo system, a set of controller parameters are obtained through the PID parameter self-tuning functi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com