Real-time positioning method based on monocular vision
A technology of real-time positioning and monocular vision, which is applied in the directions of line-of-sight measurement, image analysis, distance measurement, etc., and can solve the problems of low real-time performance and high cost of positioning methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with accompanying drawing.
[0037] The concrete technical scheme that the present invention adopts is as follows:
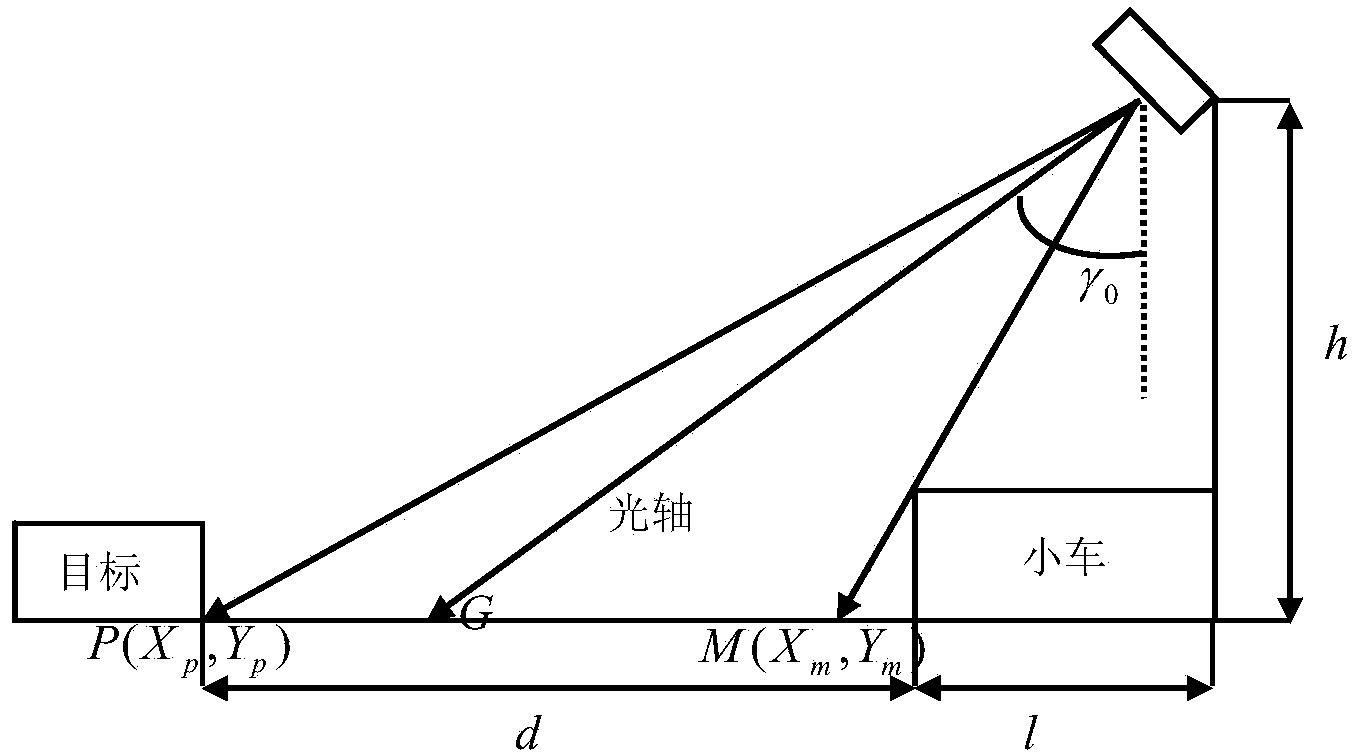
[0038] Fix an ordinary wide-angle camera on a small car, and let the camera face down at a certain depression angle, such as figure 1 . Measure the height h from the camera to the ground, the length l of the car, and the pitch angle of the camera γ 0 , the distance D from the reference point M directly in front of the car (here the intersection of the lowest vertical viewing angle of the camera and the center line of the car) to the car, and the horizontal viewing angle 2α and vertical viewing angle 2β of the camera. After obtaining the above parameters, it is assumed that the size of the picture taken by the camera is H×W, point P is p in the image, point M is m in the image, and the intersection point G of the optical axis of the camera and the ground is the main point g in the image...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com