Driving device for underwater hydraulic mechanical arm joints
A manipulator, underwater water technology, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve problems that do not involve joint operation information feedback, unsatisfactory leakage of materials, large volume and weight, etc., to achieve compact structure, light weight, and volume small effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
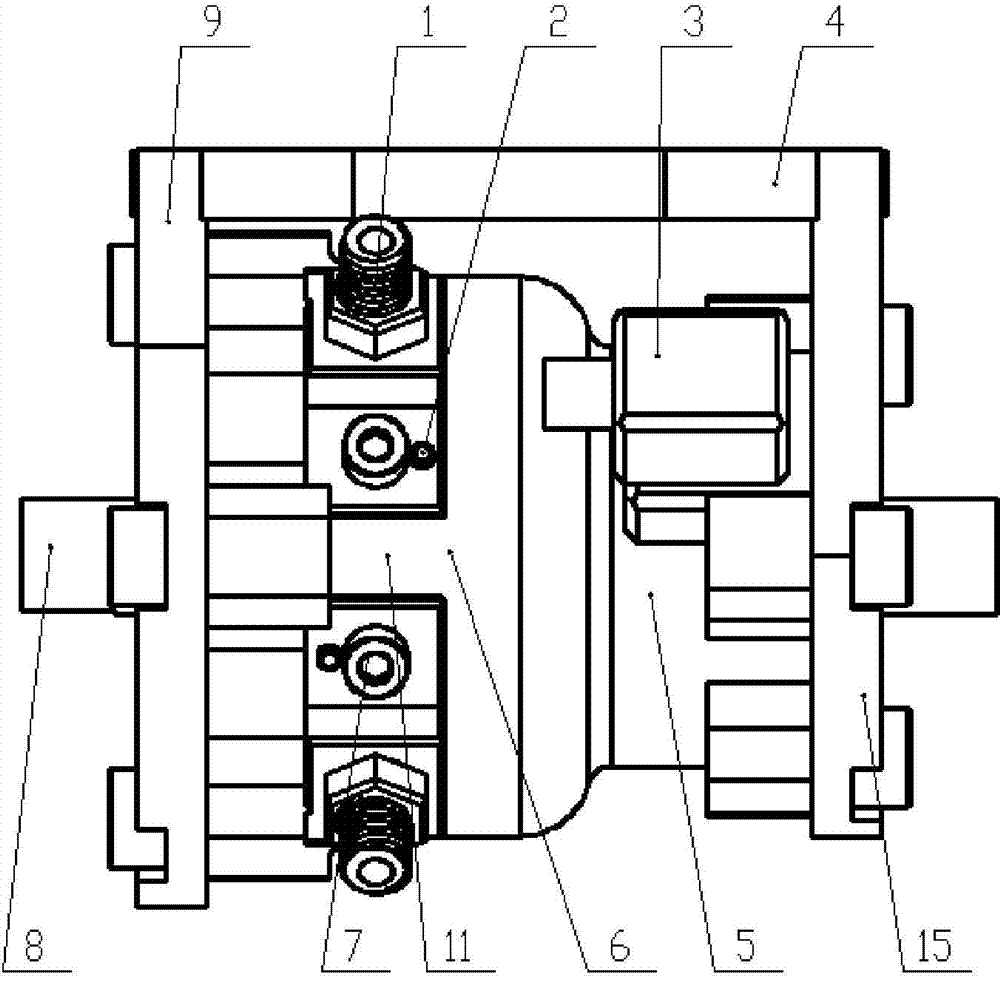
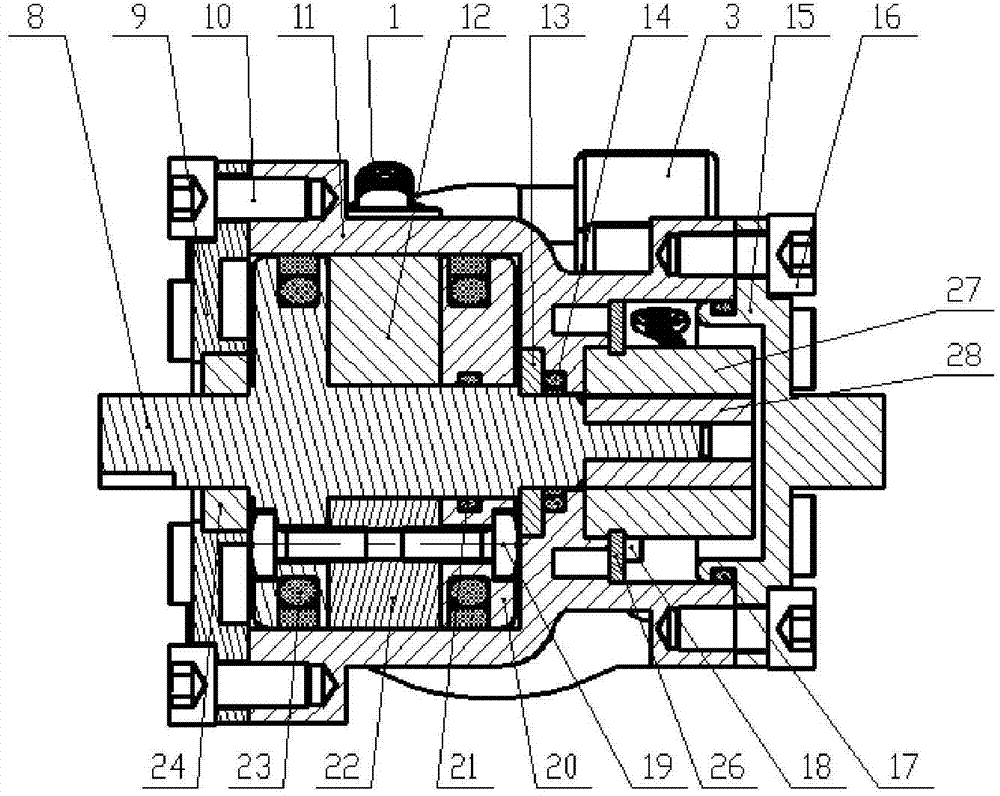
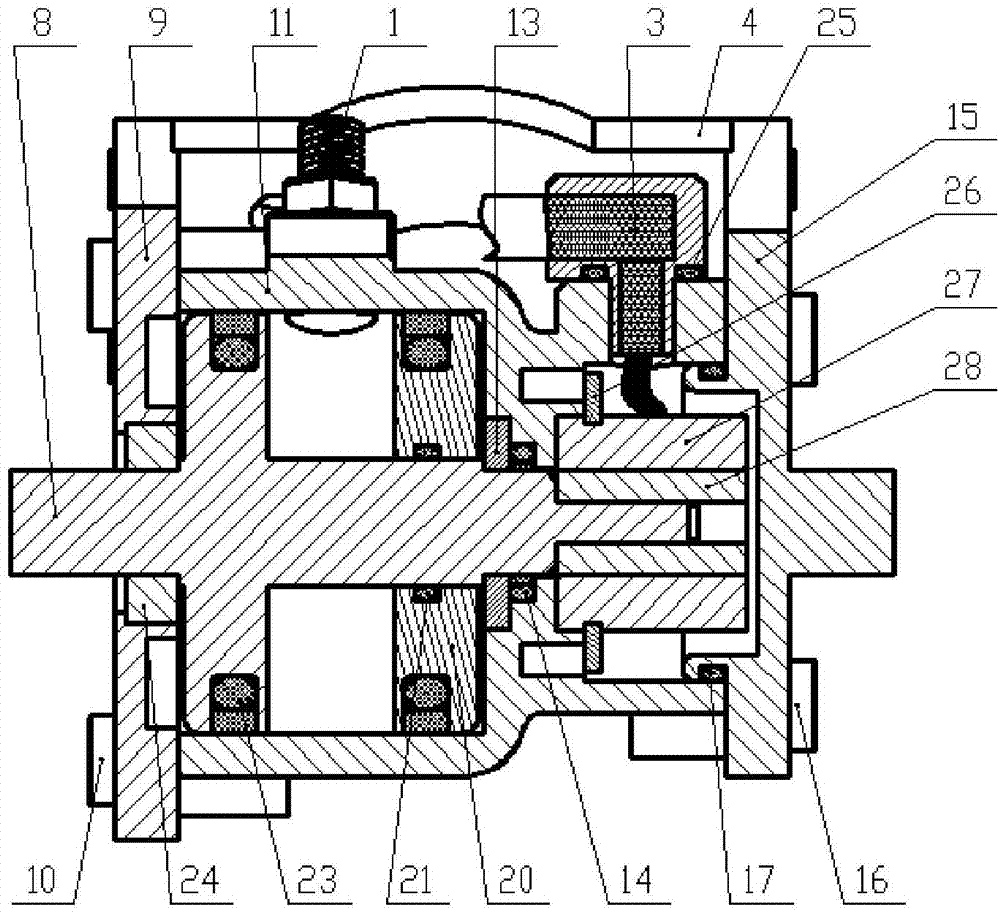
[0027] The present invention is described in more detail below in conjunction with accompanying drawing example:
[0028] combine Figure 1~1 1. The purpose of the patent of this invention is to provide an underwater hydraulic manipulator joint drive device that uses seawater or fresh water as the hydraulic medium, which is light in weight, small in size, easy to install, large in driving force and pollution-free. As the most important part of the underwater hydraulic manipulator, the device provides the driving force for the manipulator to work underwater, and feeds back parameters such as the angle and angular acceleration of the manipulator through the position detection part to facilitate the control of the joints of the manipulator by the upper computer; the device The water hydraulic drive can provide a large and stable driving torque for the manipulator, and the water hydraulic method is more environmentally friendly than the oil hydraulic (the hydraulic medium leaks to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com