Industrial mechanical arm anti-interference robustness self-adaptation PID control method
A robust adaptive, industrial manipulator technology, applied in the direction of adaptive control, manipulator, program control manipulator, etc., can solve the problems of manipulator control difficulty, manipulator maximum torque limited, manipulator system instability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
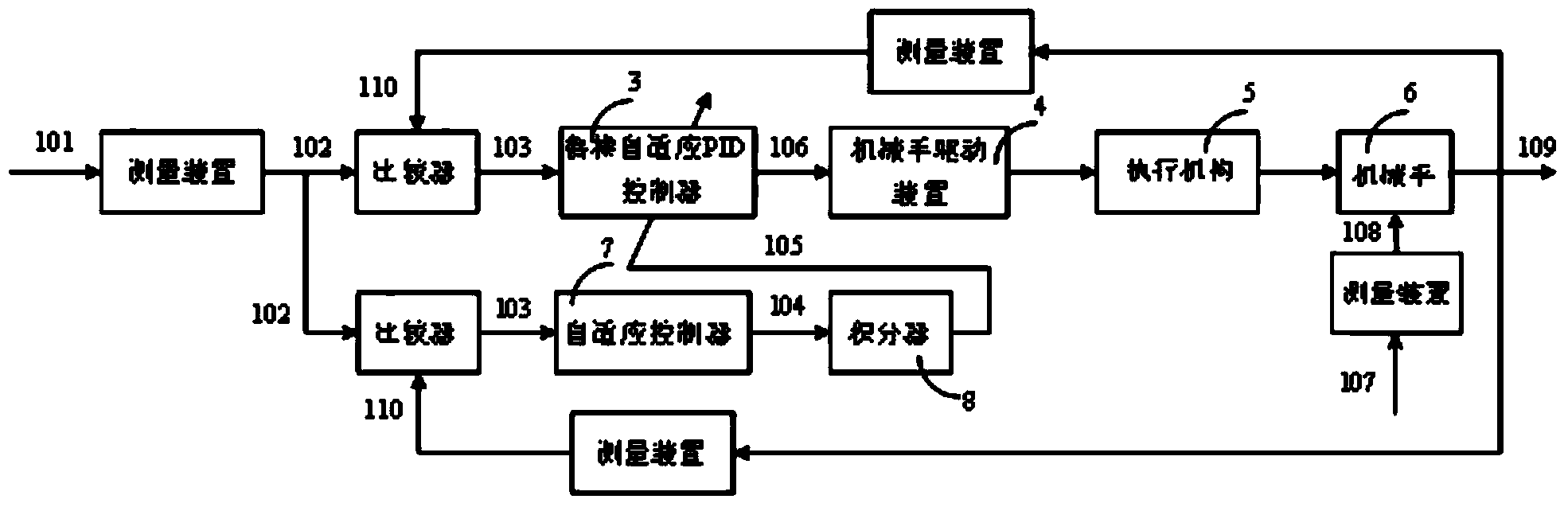
[0051] Such as figure 1 As shown, the device for realizing the anti-jamming robust adaptive PID control method of the industrial manipulator of the present invention includes a measuring device, a comparator, a robust adaptive PID controller 3, a manipulator driving device 4, an actuator 5, a manipulator 6, an adaptive control 7, integrator 8. The external disturbance 107 obtains the disturbance measurement value 108 through the measuring device, and acts on the manipulator 6. The expected input 101 obtains the expected input measurement value 102 (position, speed value) through the measuring device, and the output value 109 is obtained through the measuring device. Measured values 110 (position, speed values) are compared to obtain the error 103 between the input measured value and the output measured value, and the error 103 is input into the adaptive controller 7 to obtain the estimated rate 104 of the uncertain dynamic parameters, and after The integrator 8 obtains the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com