


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Design method of longitudinal flight model cluster composite root-locus multi-level PID (proportion integration differentiation) controller
A technology of vertical flight and model clusters, applied in the direction of electric controllers, controllers with specific characteristics, three-dimensional position/course control, etc., which can solve the problems of overshoot and other problems in design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
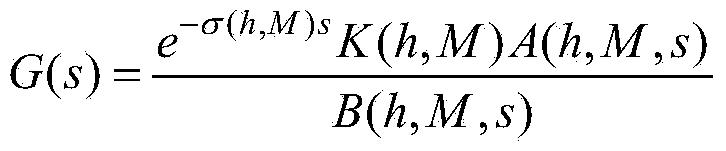
[0026] 1. Using linear frequency sweep signal at different heights and Mach numbers (f 0 is the starting frequency, f 1 is the cut-off frequency, r=(f 1 -f 0 ) / T, T is sweep time) or logarithmic sweep signal f(t)=A(t)sin{2πf 0 / r·[exp(rt)-1]} (f 0 is the starting frequency, f 1 is the cut-off frequency, r=ln(f 1 / f 0 ) / T, T is the frequency sweep time) to excite the aircraft, the amplitude-frequency and phase-frequency characteristics in the full-envelope allowed to fly can be directly obtained, which constitutes the model cluster of elevators and flight heights in the full-envelope of the aircraft, and the corresponding aircraft The open-loop transfer function family between the elevator and the flight height is described as:
[0027] Where: A(h,M,s)=s m +a m-1 (h,M)s m-1 +a m-2 (h,M)s m-2 +…+a 1 (h,M)s+a 0 (h,M),
[0028] B(h,M,s)=s n +b n-1 (h,M)s n-1 +b n-2 (h,M)s n-2 +…+b 1 (h,M)s+b 0 (h, M) is a polynomial, s is the variable after the Laplace chan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com