Small rotor flying robot for medical assistance
A flying robot and aircraft technology, applied in the field of robotics, can solve the problems of inaccurate drug placement, high transportation costs, and inconvenient transportation, and achieve the effects of avoiding land transportation traffic jams, enhancing flight stability, and reducing transportation costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
[0047] This embodiment is the embodiment of a small-sized medical aid rotary-wing flying robot.
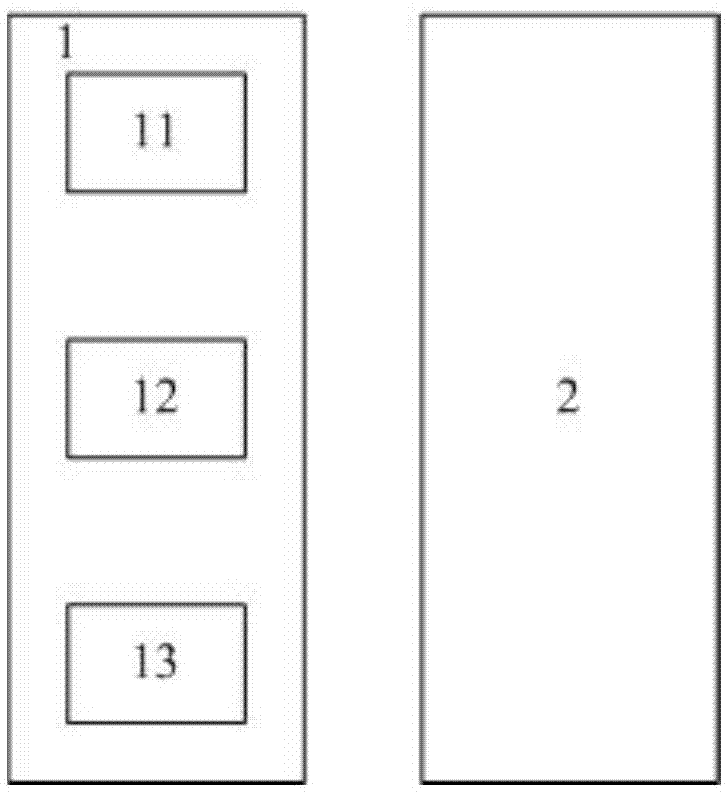
[0048] The small medical aid rotor flying robot of this embodiment, the system schematic diagram is as follows figure 1 shown. The small-sized medical aid rotary-wing flying robot includes a body, and also includes:
[0049] Autopilot system 1: used to measure the flight attitude of the aircraft, obtain spatial position and speed information, and ensure the stability and accuracy of the aircraft;
[0050] Described autopilot system 1 comprises sensor subsystem 11, flight control computer 12 and servo power system 13; Flight control computer 12 connects sensor subsystem 11, processes the data that sensor subsystem 11 obtains, determines flight angle, flight speed , heading information and space position information; the flight control computer 12 is connected to the servo power system 13, controls the work of the servo power system 13, and adjusts the flight speed and flight atti...
specific Embodiment 2
[0066]This embodiment is an embodiment of the human-computer interaction method executed on the small medical rescue rotor flying robot described in the first embodiment.
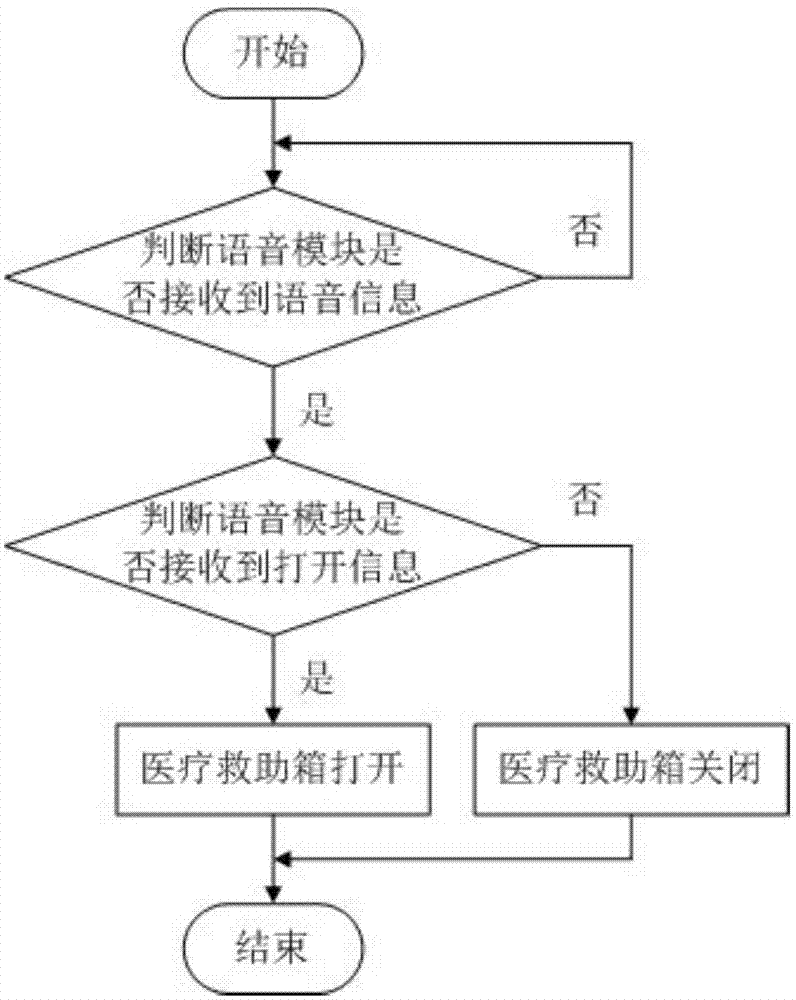
[0067] The human-computer interaction method executed on the small-sized medical rescue rotor flying robot of this embodiment, the flow chart is as follows image 3 shown, including the following steps:
[0068] Step 1, judge whether voice module 21 receives voice information, if:
[0069] Yes, go to step 2,
[0070] No, repeat this step;
[0071] Step 2, judge whether voice module 21 receives opening information, if:
[0072] Yes, go to step 3,
[0073] No, go to step 4;
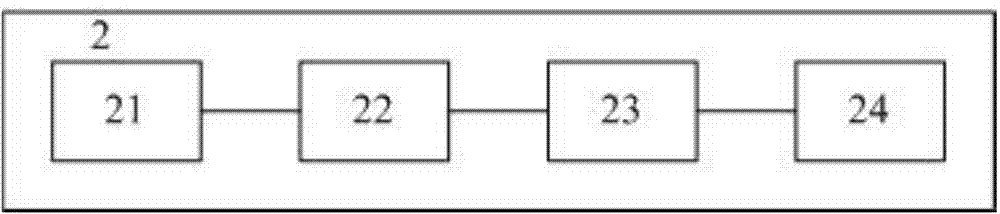
[0074] Step 3, the control unit 22 sends a control signal to open, and the medical aid box 23 is opened;
[0075] Step 4, the control unit 22 sends a closing control signal, and the medical aid box 23 is closed;
[0076] Step five, the short message sending module 24 sends the execution result in the form of a short message.
specific Embodiment 3
[0077] This embodiment is an embodiment of the human-computer interaction method executed on the small medical rescue rotor flying robot described in the first embodiment.
[0078] The human-computer interaction method performed on the small-sized medical rescue rotor flying robot of this embodiment,
[0079] It is 0 to set and judge whether the voice module 21 receives the voice information, and it is 0 if it is not received, and it is 1 to receive; it is C to open or close the information that the voice module 21 is judged to receive, and it is 0 to open, and it is 1 to close;
[0080] Specifically:
[0081] Step 1. Judgment O, if:
[0082] 1. Go to step 2,
[0083] 0, repeat this step;
[0084] Step 2. Judgment C, if:
[0085] 0, go to step 3,
[0086] 1. Go to step 4;
[0087] Step 3, the control unit 22 sends a control signal to open, and the medical aid box 23 is opened;
[0088] Step 4, the control unit 22 sends a closing control signal, and the medical aid box 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com