Negative feedback self-adaptive mechanism kinematic chain isomorphism identification method for ant colony algorithm
A mechanism kinematic chain and ant colony algorithm technology, applied in computing, special data processing applications, instruments, etc., can solve problems such as easy to fall into local optimum, lack of initial pheromone, slow algorithm convergence, etc., to ensure global search ability, The effect of overcoming the low convergence speed and ensuring the convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
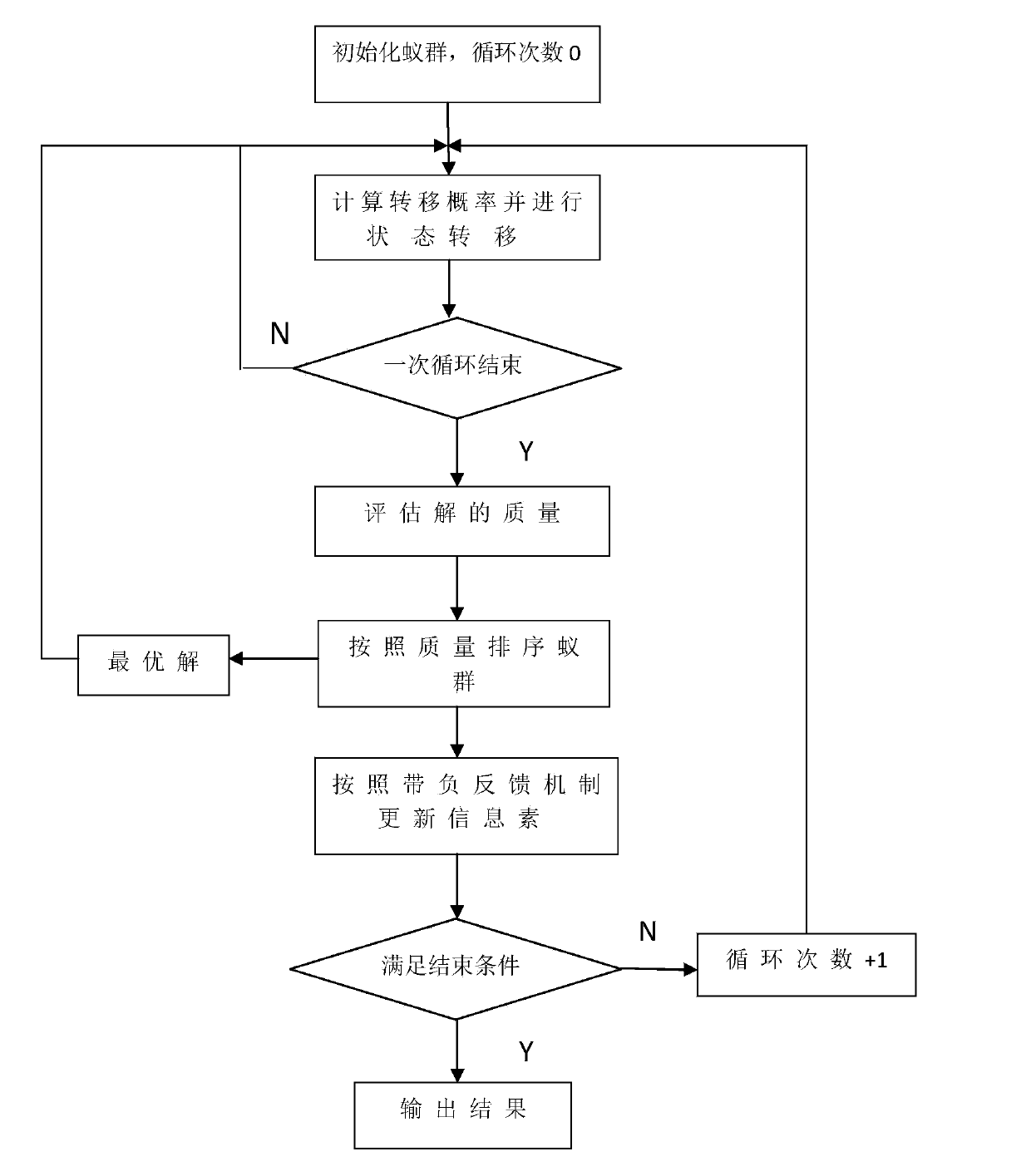
[0016] Such as figure 1 As shown, the process of solving the maximum structure code for the ant algorithm is:
[0017] 1) Parameter initialization. Let the time t=0 and the number of cycles be 0, set the maximum number of cycles N max , put m ants on n elements, let the initialization information τ of each edge (i, j) on the graph ij (t)=const, where const represents a constant, and the initial time Δτ ij (0)=0;
[0018] 2) Ant's taboo table index number k=1;
[0019] 3) The number of ants k=k+1;
[0020] 4) The individual ant selects the element j according to the probability calculated by the state transition probability formula and moves forward, j∈{C-tabu k}; among them, k=(1,2,...,m); tabu k (k=1,2,...,m) is used to record the current path of ant k, C represents the set of all paths, C-tabu k Indicates the set of paths that ant k can choose;
[0021] 5) Modify the taboo table pointer, that is, move the ant to a new element after selection, and move the element to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com