Self-moving processing robot work system and wireless charging method thereof
A working system and robot technology, applied in electromagnetic wave systems, current collectors, manipulators, etc., can solve the problems of affecting the working efficiency of robots, prolonging the search time of robots, and affecting the working time of robots, etc., achieving simple structure, long working time and high sensitivity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
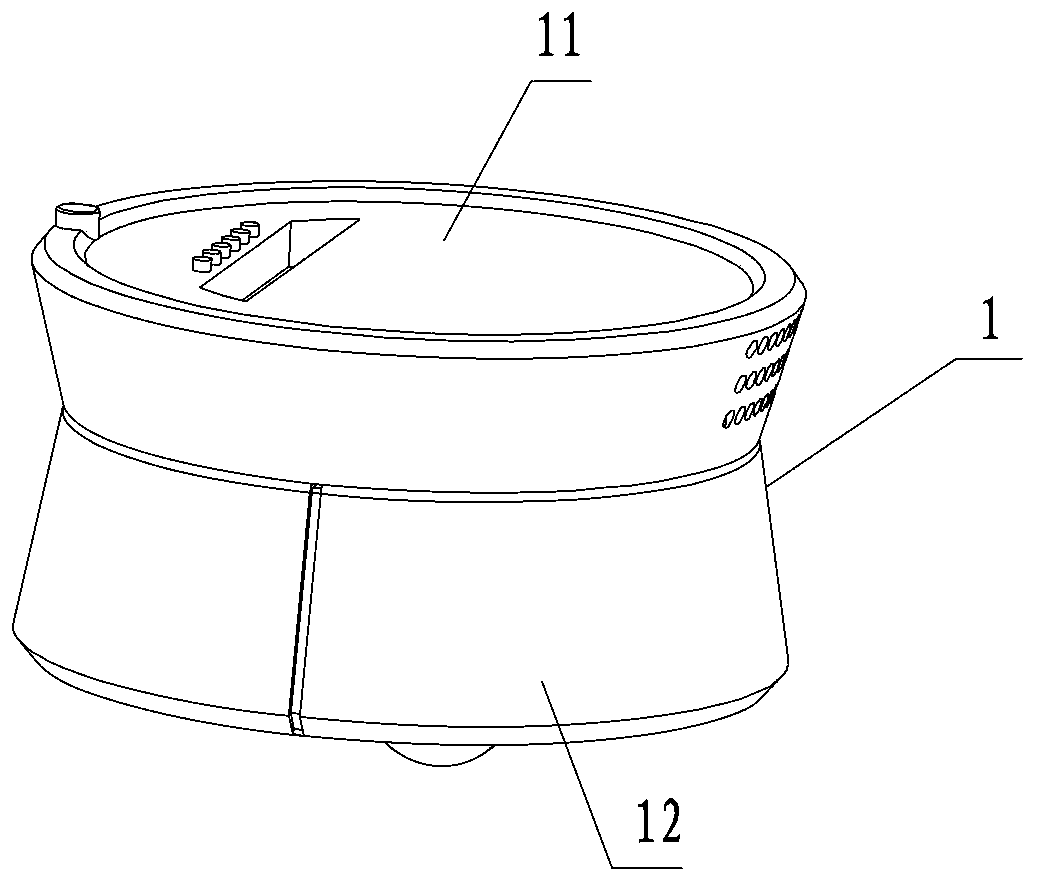
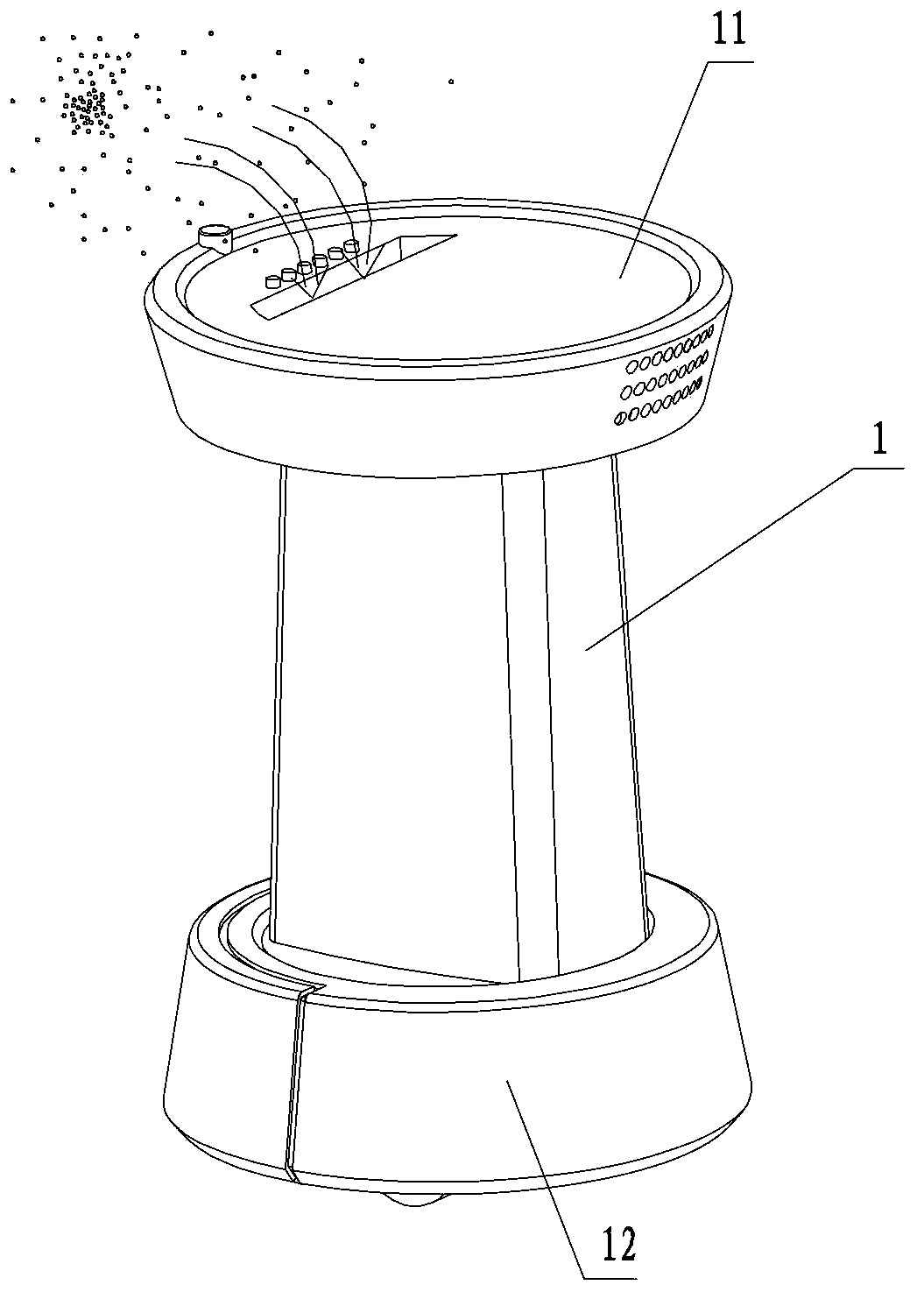
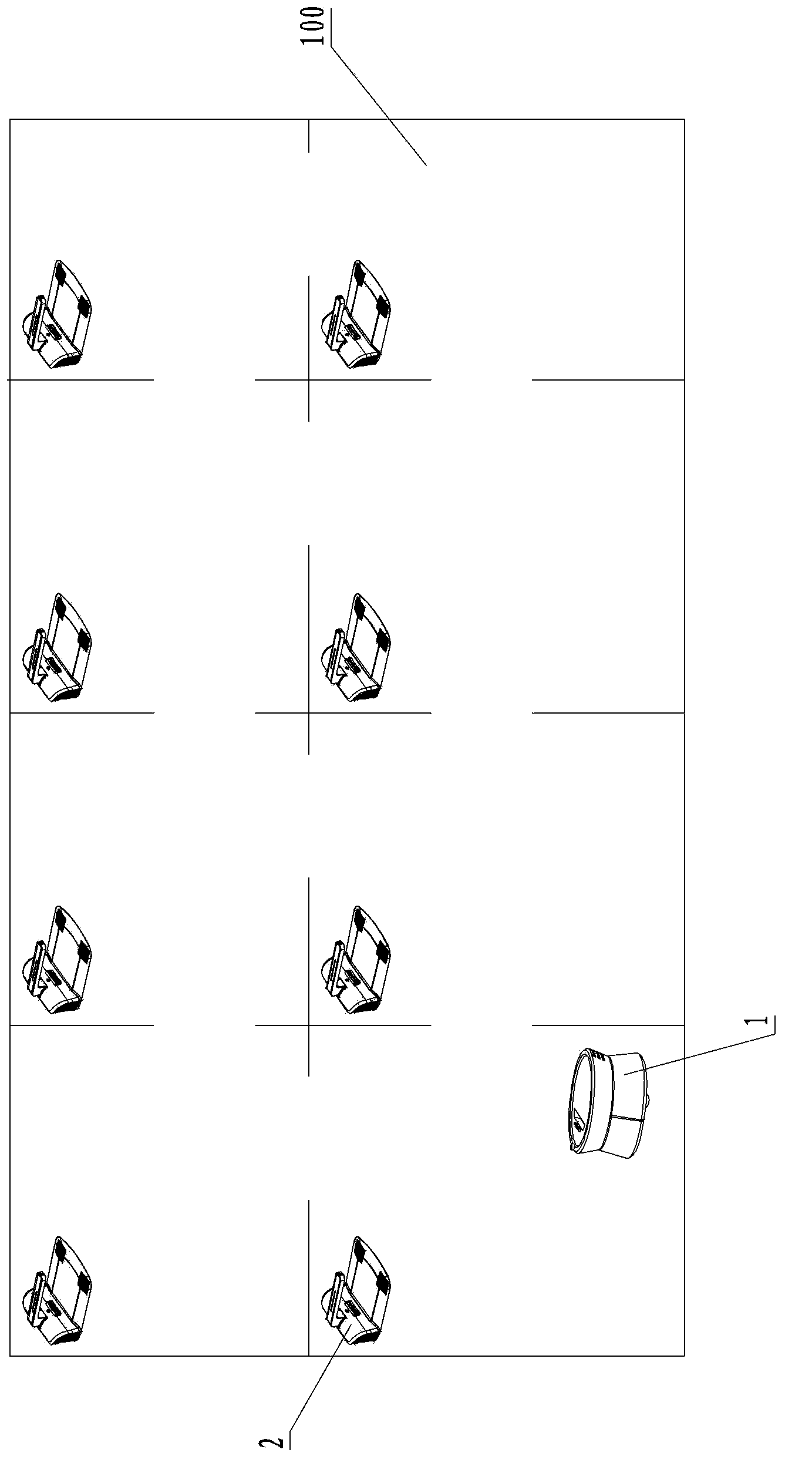
[0028] figure 1 and figure 2 They are schematic diagrams of the structure of the mobile air cleaning robot in different states in Embodiment 1 of the present invention; image 3 It is a schematic diagram of a mobile air cleaning robot looking for a base station and charging in a wireless state according to an embodiment of the present invention. combine Figure 1 to Figure 3 As shown, the present invention provides a self-mobile processing robot working system, including a self-mobile processing robot 1, and in this embodiment, the self-mobile processing robot 1 is an air cleaning robot. The air cleaning robot has a functional processing module 11 and a mobile module 12 connected to each other, and the mobile module 12 drives the functional processing module 11 to perform mobile processing operations in the working space 100 . The functional processing module 11 in this embodiment is an air cleaning module, and the air cleaning robot performs air cleaning operations in the...
Embodiment 2
[0042] Figure 4 A schematic diagram of searching for a base station and performing contact charging for the sweeping robot according to Embodiment 2 of the present invention. Such as Figure 4 As shown, the self-mobile processing robot 1 in this embodiment is a cleaning robot. The difference between this embodiment and the first embodiment is not only that the type of self-mobile processing robot 1 is different, but also that the energy supply device and the energy receiving device in the sweeping robot of this embodiment are contact devices. That is to say, the energy supply device is a charging stand 21 arranged on the base station 2, and the energy receiving device is a charging electrode correspondingly arranged on the sweeping robot. After the charging electrode is docked with the charging stand 21, the base station 2 Charge the sweeping robot.
[0043] In addition, in order to ensure that the sweeping robot has enough power to enable the robot to have sufficient work...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com