Improved particle filter-based mobile robot positioning method
A mobile robot and positioning method technology, applied in machine learning, instruments, measuring devices, etc., can solve problems such as poor particles, a large number of particles, and a large amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
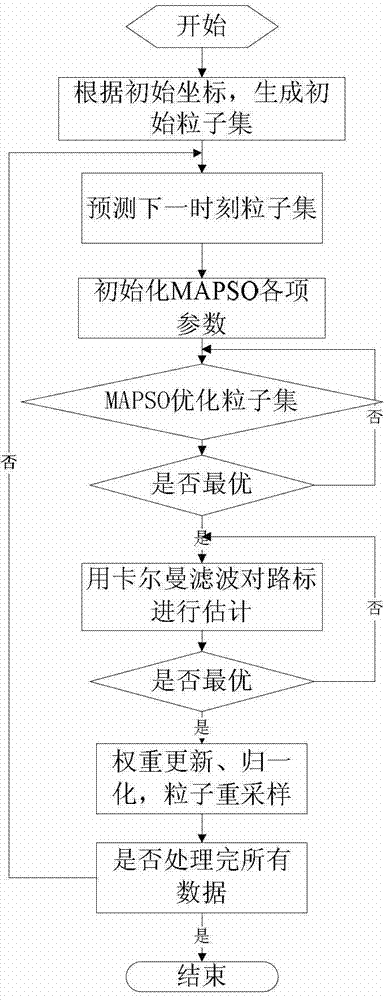
[0026] A non-limiting embodiment is given below in conjunction with the accompanying drawings to further illustrate the present invention.
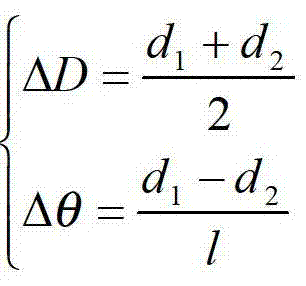
[0027] (1) Mobile robots generally use an odometer to calculate the moving distance. The working principle of the odometer is to calculate the moving distance by using the arc turned by the photoelectric encoder disc installed on the wheel within a certain period of time. Assuming that the radius of the wheel is r, the wheelbase of the two wheels is l, the output of the photoelectric encoder disc is n times / △t, and the resolution is p lines / rev, the formula for calculating the moving distance of the mobile robot is d=2πrn / p(rad), according to According to this formula, from the time t to the time t+1 of the mobile robot, the moving distance of the two wheels is d respectively due to the differential drive 1 and d 2 , through the above parameters, the displacement increment, rotation angle increment and motion radius of the robot can be o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com